Dreaming of fluffy clouds
Clouds. For a while now I've been under impression that they are present virtually everywhere. Even on beautiful sunny days in spring people seem to be fascinated by clouds. What do they see in them, I wonder. It is the extensive media coverage they receive, which suggests that they might be an important trend in computing. But how do they affect me and my every day life?
A variety of attempts has been made to describe and characterize cloud computing from different points of view. The generally agreed upon idea behind this concept is the provisioning of services and IT-resources in a dynamic and on-demand way over the Internet, backed by different billing models, such as subscriptions or pay-as-you-go. This definition is quite broad and does not limit cloud computing to certain types of services or IT-resources. Yet, today we typically associate cloud-based products with one of three categories, which address infrastructure, platform and software needs.
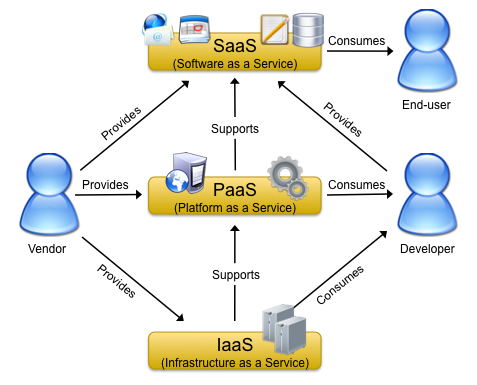
The following image is based on a publication by Briscoe and Marinos ("Digital Ecosystems in the Clouds: Towards Community Cloud Computing") and presents a view on these three types of clouds with the relationships among them and between vendors and users.
- Infrastructure-as-a-Service (IaaS) is concerned with the provisioning of storage and processing power, the latter of which is typically implemented and provided in terms of so-called virtual machines. A virtual machine is a computer that is simulated on top of a phyiscal machine and that can be fully configured by the user, (virtual) hardware- and software-wise. IaaS can support ...
- Platform-as-a-Service, which is a means of providing an execution platform for user-provided applications in the cloud. Although not as customizable as IaaS clouds, PaaS clouds typically have the benefit of providing a simple and efficient way for the implementation of application for the Internet. They form an abstraction layer over actual (physical or virtual) machines and can thereby provide a developer-friendly ecosystem for application development and deployment. Based on such a platform, vendors and users may provide ...
- Software-as-a-Service. Actual products for end-users, such as e-mail and calendars, but also web-based document processing or image mangement. Think Google Apps and Microsoft Office Live, just to give to examples of SaaS cloud services, although most other Web 2.0 products may as well be categorized as SaaS.
 Since its inception, cloud computing has been established as a viable alternative to traditional in-house provisioning of IT-resources and is continously gaining more acceptance and use in both personal and corporate environments. It enables companies to outsource their infrastructure and service needs, to save investments in local computing resources and the management thereof, and to react to changing requirements more flexibly since cloud resources can be requested and used on demand.
Since its inception, cloud computing has been established as a viable alternative to traditional in-house provisioning of IT-resources and is continously gaining more acceptance and use in both personal and corporate environments. It enables companies to outsource their infrastructure and service needs, to save investments in local computing resources and the management thereof, and to react to changing requirements more flexibly since cloud resources can be requested and used on demand.
However, with the use of these public clouds, as offered by Amazon, Microsoft and Google, to name some of the big providers, companies incur a dependency on these external providers. The reliability of their service provisioning is a critical factor for the continuing success of the company and is typically detailed in service level agreements between the provider and the consumer among other quality-of-service characteristics.
Nevertheless, cloud computing outages have caused severe problems in the past with service and infrastructure down-times ranging from a few minutes to multiple hours, as illustrated by Alex Williams in his article "Top 5 Cloud Outages of the Past Two Years: Lessons Learned". Today the analysis and repair of these problems is typically performed by human operators, which makes it difficult to predict the time required for the reestablishment of cloud availability to normal levels or to levels as specified in service level agreements. In order to be able to provide robust cloud services it is therefore necessary to automate at least large parts of these analysis and repair steps.
In the ASCENS project we pursue this goal by introducing a sense of self-awareness to clouds to enable autonomous reactions to changes in the infrastructure, such as the abrupt departure of computation nodes, to give an example. By enabling autonomous reactions, we seek to be able to deliver more robust cloud services with higher quality-of-service levels. This idea of self-healing systems is something we think is vital for delivering reliable cloud services as it transfers the responsibility of fault analysis and repair from human operators to machines, which are able to perform these actions in shorter time spans thereby reducing potential downtimes of services and improving customer satisfaction.
Clouds. The vision of making data and services accessible from anywhere at any time is very appealing and fits in perfectly with our changing lifestyle and higher mobility. Music, movies, documents, pictures, ... No longer are we limited by the fact that these artifacts are stored locally on some machine that we first need to switch on in order to gain access. Our data and important services, such as e-mail and calendars, live in the Cloud and are available to us on desktop computers, notebooks, smartphones and other portable devices. At the same time we incur a dependency on being connected to the Internet and to our cloud providers. If the provider is not able to service our requests, well, then we are blocked from accessing our data. It is therefore crucial that cloud services are robust and highly-available. This is what we strive for in the ASCENS project.
Ensembles and mobile robots, where is the link?
Mobile robotics systems are complex artifacts composed of dozens of sensors, actuators, processors, processes, behaviors and even robots, if we consider robotic swarms. Mobile robots evolve mostly in complex unpredictable environments, interact with objects, infrastructures or even humans. Designing and controlling such systems and predicting their performances is a real challenge, where formal design tools are drastically missing. One goal of ASCENS is to provide the theoretical foundations and the technical tools to perform this design.
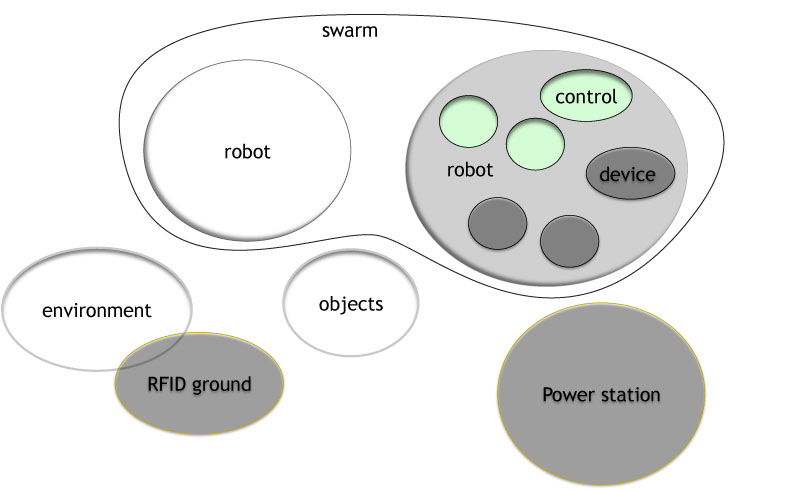
What is the link of this with ensembles? As mentioned in the first post of this blog: "Ensembles are software-intensive systems with massive numbers of nodes or complex interactions between nodes, operating in open and non-deterministic environments in which they have to interact with humans or other software-intensive systems in elaborate ways.". In robotics we can consider several types of nodes, depending on the level of abstraction one chooses. The hardware modules (intelligent sensors and actuators) of a robot can be considered as nodes within a single robot, interacting through a interconnection bus. Basic controlling behaviors that are combined to achieve the global behavior of a robot can also be considered as nodes, at a more abstract level. Abstracting even more, robots in a swarm can be considered as nodes within the swarm ensemble. One can even consider all these nodes simultaneously, building a hierarchical structures of nodes. This creates a massive number of nodes, fitting to the ensembles definition given above. The interactions between these nodes are complex, because of the complexity of the structure, of the global result and of the environment. The type of environment where robots evolve is non-deterministic and can include interaction with humans or others robots / artifacts, fitting again to the ensemble definition given above.

Therefore swarm robotics has been chosen as one of the three case studies of the ASCENS project. The robots used in this case-study is the marXbot, developed at EPFL. The marXbot has an internal distributed architecture, called ASEBA. The marXbot can interact with other robots, even physically by self-assembling in a bigger entity. Finally the marXbot supports interaction with specific environment systems, such as an RFID ground. Because of this large set of features, the marXbot robot is the ideal platform to implement and validate the concepts developed within ASCENS. Stay tuned for astonishing new approaches to robot control design!