Global Parking Allocation
The e-Mobility case study aims at solving global problems, involving large ensembles of different vehicles. Such large problems tend to be complex to solve and often a globally optimal solution may be impossible to find. For this reason specific strategies are needed to solve them. In particular, we are interested in the parking optimization problem, consisting in finding the best parking lot for each vehicle of an ensemble. The best parking lot is chosen by considering: the distance from the current location of the vehicle to the parking lot, the distance from the parking lot to the appointment location and the cost of the parking lot.
We present two approaches to solving the parking optimization problem, joint work between Ugo Montanari, Giacoma Valentina Monreale and Matteo Sammartino at the University of Pisa, and Nicklas Hoch, at Volkswagen AG, Corporate Research Group in Wolfsburg. These approaches are based on the coordination of declarative and procedural knowledge. Declarative knowledge consists in a global description of the problem and its structure, in terms of its subproblems. General algorithms can be applied at this level, with high computational cost. Procedural knowledge defines which strategies should be applied to subproblems, and how their solutions can be combined into a possibly suboptimal, but acceptable global solution. Strategies are often more efficient than general algorithms, because they rely on specific knowledge about problems, which could also allow for the application of heuristics in order to improve the computational cost.
Both approaches are based on the representation of optimization problems as Soft Constraint Satisfaction Problems (SCSPs) [1], that are Constraint Satisfaction Problems where constraints are soft, meaning that they are preferred, but not required to be satisfied. Preference is formalized as a cost associated to each assignment of constraint variables. Optimality is defined in terms of the overall cost, which should be typically minimized.
Soft Constraint Logic Programming
The first approach consists in decomposing the global optimization problem in many local optimization problems, one for each vehicle of the ensemble, consisting in determining the best parking lot for it. All these local problems are solved separately by using an implementation of Soft Contraint Logic Programming (SCLP) [2]. The orchestrator implementing the coordination strategy then receives the results of all the local optimization solutions and checks if the local solutions all together form an admissible global solution, i.e., if no parking lot receives a number of cars larger than its capacity. If it is so, the problem is solved, otherwise the orchestrator queries the declarative knowledge again, but now by increasing the costs of the parking lots which received too many requests. The procedure is repeated, with suitable variations, until a global solution is found. Notice that in this way the orchestrator has a hypothetical, transactional behavior, with the options of committing (a solution is found) or partially backtracking (on the parkings which are overfull). The solution is guaranteed to be just an acceptable global solution: it may or may not be globally optimal. However, sub-optimality is in general needed to solve the problem in reasonable time.
The choice of SCLP is justified by its flexibility and expressiveness. On the one hand, the programmer could easily use SCLP to experiment on various optimization strategies for this and other more complex problems for electric vehicles. On the other hand, the interaction between the local optimizer and the global orchestrator is easier if the latter is declarative as it is the case for SCLP.
The coordination technique has been implemented in a demo application. We used Java for the orchestrator and CIAO [3] to model and solve the local problems. The figure below shows one phase of this execution.
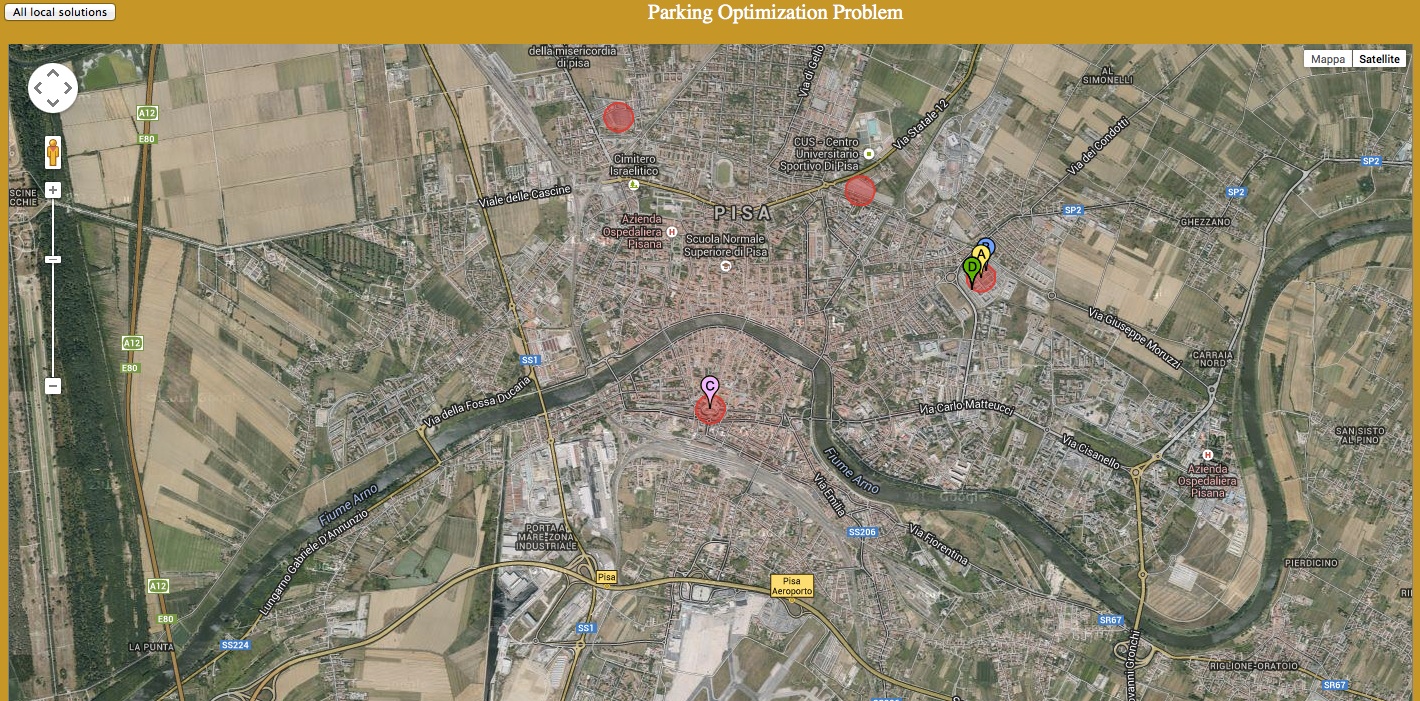
There, four vehicles, represented by the markers A, B, C and D are finding a parking lot. Parking lots are represented by circles and each has a capacity of two vehicles. Each vehicle has autonomously computed the best parking lot for it and has sent its local solution to the Java orchestrator. Therefore, the vehicles A, B and D would like to park in the rightmost parking lot, while C prefers the parking lot at the lower part of the map. The orchestrator checks if each parking lot is able to satisfy the requests of the vehicles. In this case, since there are too many requests for the rightmost parking lot, the orchestrator increases the cost of it and asks the vehicles to recompute new local solutions.
Details about SCLP approaches to e-mobility optimization problems in ASCENS can be found in [5,6].
An algebraic approach to SCSPs
The second approach consists in representing SCSPs as terms of an algebraic specification, similar to a process calculus. These terms are then inductively evaluated in a domain of cost functions, where operators are interpreted as optimization steps. Using a dynamic programming approach, optimization is then carried out on these functions. The crucial point is that syntax also determines the variable elimination strategy, i.e., a solution to the secondary optimization problem of dynamic programming.
In order to illustrate this approach in more detail, we consider the term
(x1)(x2)(x3) ( A(x1,x3) ‖ B(x2,x3) ‖ C(x2) )
It represents a system with three parking zones A,B and C. Variables represent vehicles, and atomic terms A(x1,x3), B(x2,x3), C(x3) tell which vehicle can be parked in each zone. Each restricted variable must be parked in one of the zones within its scope.
Each zone comes with two pieces of information: a capacity and a function telling the cost of parking vehicles inside the zone. This allows us to give cost functions for each atomic subterm, and to inductively construct functions for complex terms. Restrictions is interpreted as variable elimination: the cost function in its scope should be optimized w.r.t. the restricted variable. Therefore, the position of restrictions determines a solution for the secondary optimization problem.
In the term shown above, restrictions are all outside (we say that the term is in normal form), meaning that we optimize w.r.t. all variables at once. This is inefficient, because it is clear that x1 must be parked inside A and x2 inside either B or C. Therefore, we introduce a scope extension axiom that allows restrictions to be moved. The following term
(x3)( (x1)A(x1,x3) ‖ (x2)( B(x2,x3) ‖ C(x2) ) )
is said to be in canonical form (namely no restriction can be pushed inside further) and describes a more efficient solution for the secondary optimization problem.
Given a SCSP term p, an essential property is that its cost function can be represented as a finite table, because only assignments to free variables of p matter. This allows computing cost functions using dynamic programming with tabling. More precisely, one can proceed in a bottom-up style, from atomic subterms to increasingly complex terms; tabular representations of cost functions are computed the first time they are encountered, once and for all.
An example is shown in the following figure, where double square brackets denote the evaluation operation that gives cost functions for terms. Tables (a)-(c) show cost functions for each zone. Actual cost entries are arbitrary. The leftmost columns indicates whether a car is parked inside (✓) or outside (-) the subsystem described by the term.
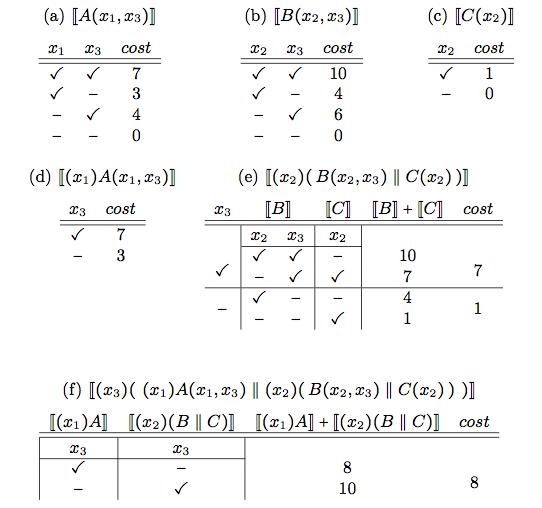
The resolution algorithm eliminates all the variables in the order they appear, from the inmost to the outmost one. It has the following steps:
- Elimination of x1: Table (d) is computed by forcing x1 to be inside A;
- Elimination of x2: Table (e) is computed by taking the best parking option for x2, i.e., the one that minimizes the total cost, for each possible value of x3;
- Elimination of x3: Table (f) is computed by taking the best parking option for x3.
Tracking back through the tables, we find the optimal variable assignment, namely: x1 and x3 inside A, with cost 3 and 4 respectively; x2 inside C, with cost 1.
Exploiting specific knowledge about the parking system, and the applicative scenario it is part of, we can apply some heuristics in order to reduce the complexity of the problem, possibly at the cost of having sub-optimal, but hopefully still acceptable, solutions. A few options are:
- Restrict the number of possible zones for each car. Keeping only some of the best parking options for each car makes the solution simpler. However, it may increase the total cost (and it may even make the solution impossible).
- Hierarchical organization of zones. Similar zones could be merged, leading to a smaller term. The hierarchy could depend on particular events such as soccer games, theater shows, etc.
- Bound size for tables. We could impose a maximum size for dynamic programming tables. Bigger tables could be replaced by some smaller ones, taking some averages (see [4]). The advantage is a lower storage cost and lower computational complexity of term evaluations.
Details and full proofs can be found in [7].
References
[1] Rossi, F., van Beek, P., Walsh, T.: Handbook of Constraint Programming (Foundations of Artificial Intelligence). Elsevier Science Inc. (2006)
[2] Bistarelli, S., Montanari, U., Rossi, F.: Semiring-based contstraint logic programming: syntax and semantics. ACM Trans. Program. Lang. Syst. 23(1), 1–29 (2001)
[3] Bueno, F., Cabeza, D., Carro, M., Hermenegildo, M.V., Lopez-Garcia, P., Puebla, G.: The ciao prolog system. Reference manual. Tech. Rep. CLIP3/97.1, School of Computer Science, Technical University of Madrid (UPM) (1997)
[4] Montanari U.: On the optimal approximation of discrete functions with low-dimensional tables. IFIP Congress (1971)
[5] Bures, T.,De Nicola, R., Gerostathopoulos, I., Hoch, N., Kit, M., Koch, N., Monreale, G.V., Montanari, U., Pugliese, R., Serbedzija, N., Wirsing, M., Zambonelli, F.: A Life Cycle for the Development of Autonomic Systems: The E-mobility Showcase. In: SASO, Awareness Workshop (2013)
[6] Monreale, G.V., Montanari, U., Hoch, N.: Soft constraint logic programming for electric vehicle travel optimization. In: 26th Workshop on Logic Programming (2012)
[7] Hoch, N., Monreale, V., Montanari, U., Sammartino, M.: Declarative vs procedural approach for scsp with an application to an e-mobility optimization problem (2014), Internal Report
Can component policies be exploited by external reasoners?
In a scenario like the e-mobility one, e-vehicles should be equipped with reasoning units capable of dealing with unexpected events, like e.g., failure in booking a parking lot, traffic jams, or unavailability of booked parking lots. To react to these situations, appropriate actions should be determined and taken. We discuss the reasoning issue in the context of SCEL, a formal language developed to program autonomic computing systems in terms of the constituent components and their reciprocal interactions.
As shown in Figure 1, a SCEL autonomic component results from the interaction among knowledge and behavior components, according to specific policies. These provide a simple, yet expressive, linguistic tool for defining and enforcing rules to specify strategies, requirements, constraints, guidelines, etc. about the behaviour of systems and of their components.
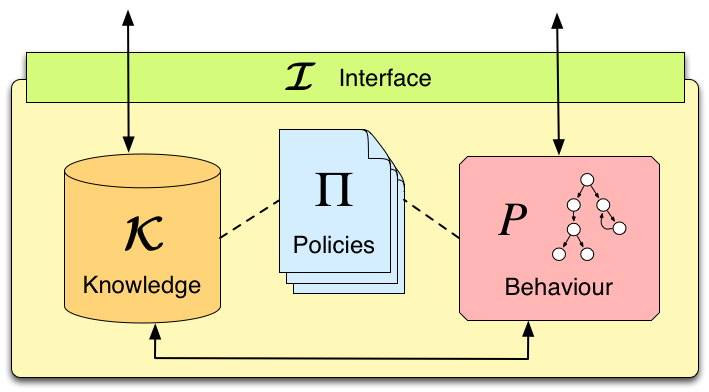
Figure 1: SCEL component
Policies may depend on the values of components' attributes (reflecting the status of components and their context) and can be dynamically modified for better reacting to system or environment changes. Moreover, as an effect of policy evaluation, specific actions, implementing adaptation strategies, can be produced at run-time and used to modify the behaviour of components.
Therefore, policies provide a simple form of self- and context-aware reasoning, supporting the achievement of self-* properties of the autonomic system. For example, when an e-vehicle is looking for available parking lots in nearby car parks, an internal policy could be used to ignore both parkings not equipped with charging station if the e-vehicle has a low battery level, and parkings with a cost per hour greater than a maximum cost established by the driver.
However, more sophisticated reasoning machineries can be necessary to deal with specific circumstances or when concerned with specific application domains. In these cases, separate reasoning units can be used by SCEL programs whenever decisions have to be taken.
Different reasoners, designed and optimised for specific purposes, can be exploited according to the components needs. Specifically, whenever SCEL systems have to take decisions, they have the possibility of invoking an external reasoner to receive informed suggestions about how to proceed. These answers would rely on the provided information about the relevant knowledge systems have access to and about their past behavior.
For example, in case of an unexpected event in the e-mobility scenario, a reasoner could be exploited by e-vehicles to dynamically re-plan their journey. Intuitively, the list of points-of-interest to be visited should be provided to the reasoner, which would shuffle it following some criteria, and would return the obtained list to the SCEL component that required it.
Figure 2 depicts such an enriched SCEL component, together with a generic external reasoner R. With respect to Figure 1, now local communications are filtered by a reasoner integrator RI (see post "Reasoning about reasoning agents").
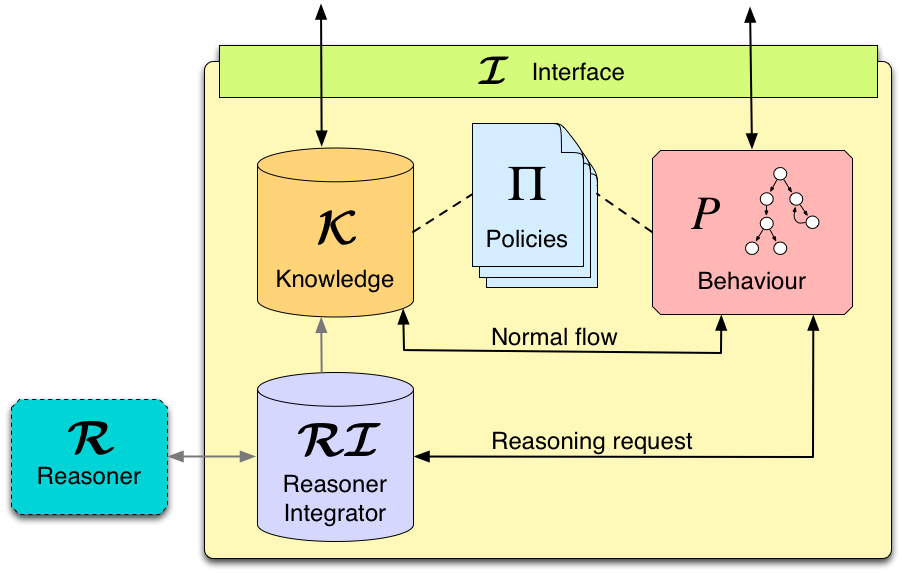
Figure 2: SCEL component with external reasoner
What we envisage is using policies not only for regulating components interaction, but also for managing the use of external reasoners. Policies could instruct the reasoners according to specific conditions on the internal status of the component and on external factors. For example, policies could urge the reasoner to return a solution as soon as possible, thus avoiding an exhaustive search. Moreover, policies could act as a filter for input data sent to the reasoner (e.g., sensible information about the driver could be removed from his profile before passing it to the reasoner), as well as for output data (e.g., actions returned by the reasoner could be blocked if they violate the e-vehicle polices). Anyway, as shown in Figure 3, how to reconcile policing and external reasoning is still an open issue.
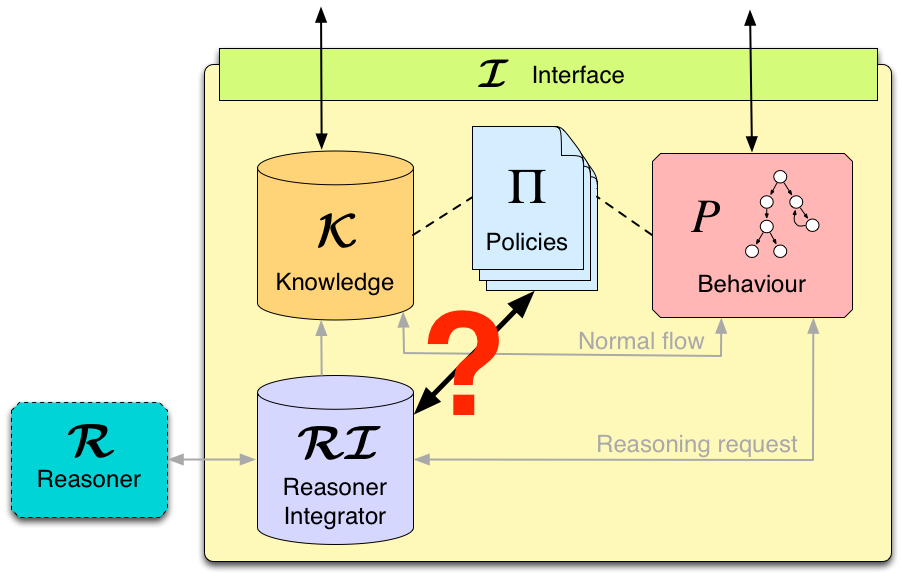
Figure 3: integration between policies and external reasoner
To tackle this issue, we should first be able to conceive under which conditions policies can help the reasoners, and to define appropriate interactions protocols between reasoners and policies handlers.
Rocco De Nicola and Francesco Tiezzi
IMT, Lucca
Why is it useful to describe e-mobility using service component ensembles (SCE)?
Own Car versus Mobility Service
In a future e-mobility-scenario, it is assumed that many people don’t have their own cars. They will use vehicles temporally depending on their mobility needs. Why this assumption?
There are many of reasons for this development. All of these reasons are closely related to energy constraints and hence to the battery. The limited capacity of the battery leads to range limitation. The necessary charging time reduces the e-car availability. The high battery cost makes the car expensive and the life cycle of battery limits the time value of the vehicle. Through these arguments it can be seen that user will value mobility more than the e-vehicles itself.
Temporal Composition of Service Component Ensembles

From this point of view it is interesting to apply flexible service architectures for supporting the user. The scenario components “user” (blue colored in the figure) and “vehicle” (green colored) are no longer strongly connected in this e-mobility scenario. The scenario components are represented by their service components, which are acting as components in the user-vehicle-infrastructure network. All service component types are temporally connected for trips or sequences of trips (journeys). Additional infrastructure service components (yellow colored) assist by searching charging stations or route planning. In this view trips (A, B, C) in a journey are the constructors of service component ensembles (SCE).