Which is the best robotic scenario to test our ensembles?
This question is a recurrent one in many projects dealing with mobile robotics and there is no largely recognized benchmarking scenario. Often the validation scenarios are adapted to the approach of the project, allowing to better show the performances of the proposed approach, of course. In ASCENS we have a different goal: we need a scenario where the various parameters can be modulated, where we can check a global approach and meet several challenges: modeling of complex environments or tasks, optimization, need for adaptation, fault tolerance, task allocation, constrains satisfaction, etc. Moreover the scenario has to be implemented both in simulation and on real robots.
Although not recognized as a benchmarking scenario in the whole mobile robotics community, "foraging" represent a class of tasks that is often used, especially in bio-inspired robotics. This task already includes coverage of an area, transportation and storage. These subtasks allow already dealing with task allocation and resources optimization challenges, for instance. Despite all this, we still found this task too simple and decided to add one interesting constraint: an external toxic source, potentially damaging the robots themselves. The final scenario looks very much like a "search and rescue" scenario, described in the following illustration:
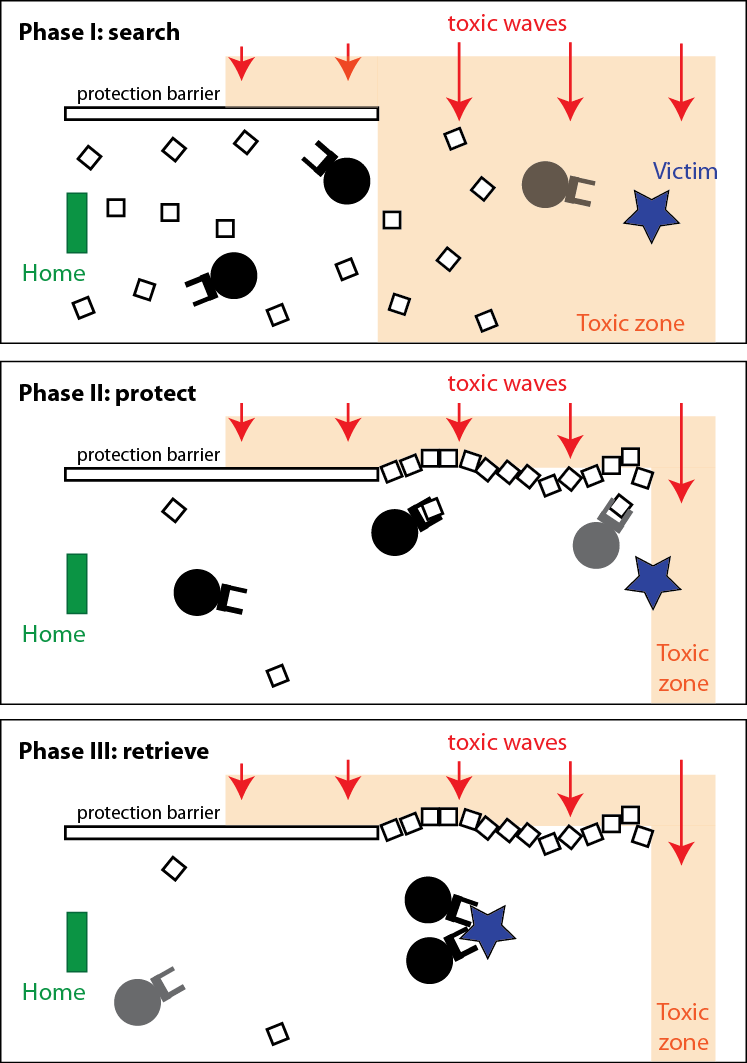
Illustration of the rescuing scenario in three phases.
In this scenario we have a home and a victim to rescue in a toxic environment. The home is in a safe zone protected from the toxic waves by a protection wall. The victim is in a zone exposed to the toxic waves. Within the environment there are construction blocks that can be used to build protection walls. The goal is to bring the victim to the home. We can split the whole mission in three phases: search, protect and retrieve.
This scenario is very interesting because it allows exploring, among others:
- Various types of tasks such as exploration, target location, transport of building blocks, construction and collective transport of large objects.
- Sequential as well as parallel actions. Robots can search and in parallel protect, or run these two phases in a sequential way.
- Task allocation, as robots could have different tasks.
- Optimization of resources, as robots have limited resources and could be damaged by the toxic waves.
- Bio-inspired as well as classical AI approaches.
- Simulated and real implementations, as all elements of the scenario can be implemented using our marXbot robots. The toxic waves can be implemented using a lateral light source, colored or modulated.
All these aspects can be pushed to the highest complexity, or reduced to permit simple solutions, depending on the focus of the research. We believe that we have here all the components to generate a set of compatible scenarios that can, combined, address a class of real-world applications.
Francesco Mondada and Michael Bonani