Robot Swarms – What can formal methods do?
Previous posts of this blog (see Ensembles and mobile robots, where is the link? and Robot Swarms – What can they do?) have convinced us that the swarm robotics case study is of great interest and importance to the ASCENS project. In fact, on the one hand, swarm robotic systems comfortably fit to the ASCENS notion of ensemble and, on the other hand, the lack of formal tools for designing, controlling and reasoning on such systems poses a major challenge to the ASCENS researchers. To meet this challenge, we intend to devise new formal methods and approaches capable of dealing with the distinctive aspects and the complexity of swarm robotic systems and, more in general, of autonomic service-component ensembles.
But what can formal methods actually do? We don't aim at providing here an exhaustive answer to this question, by making e.g. a tedious list of approaches, techniques and tools that we plan to use and/or develop in ASCENS. This post indeed wants to give just a taste of the use of formal methods in this setting. In particular, we present below a result of our first attempt at formalizing and analyzing a scenario of the ASCENS robotics case study.
The following video shows a (stochastic) simulation, based on the use of the language Klaim and some related tools, in which three robots are in charge of collectively transporting an object to a goal area.
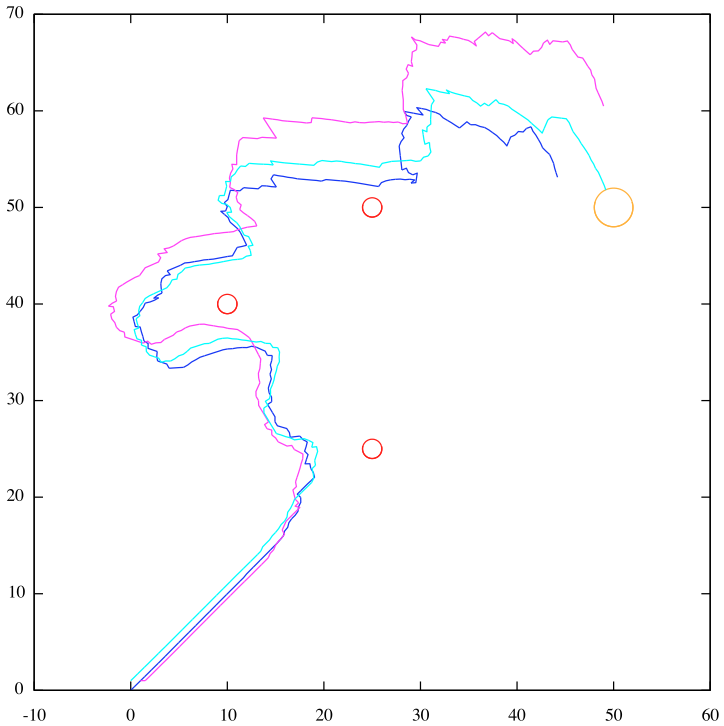
Robotics scenario in Klaim: result of a simulation (VIDEO)
Initially, the robots start moving towards the goal (i.e. the big circle in the upper-right corner). As soon as an obstacle enters into the range of their distance scanners, the robots change their directions and pass over the obstacle. This way, they reach without collisions the goal.
A formal study of such systems offers many advantages with respect to an experimental evaluation. Indeed, the latter approach is usually costly to organize, time consuming, incomplete and, sometimes, prohibitive in the design phase. Instead, a formal approach enables the exploration of several different situations and the prediction of the systems behavior.
Robot Swarms – What can they do?
Swarm robotics has been chosen as one of the three case studies of the ASCENS project. But why are robot swarms interesting, and why are they a useful case study for the ASCENS project? Our contention is that for many real-world problems, it is often more effective to use large cooperating teams of simple, cheap robots than to use a single complex robot. In Nature, ants can build complex nests that are orders of magnitude larger than a single ant, and whose construction lasts many ant lifetimes. Similarly, we envision future swarms of robots performing tasks autonomously, in a robust parallel way.
In the following video, a group of robots team up to transport an object that is too heavy for a single robot to move. Note that the control is distributed - the designer of the system set up simple rules to ensure that the robots would cooperate to move the object. But the rules are set up in such a way that the number of robots doesn't need to be specified in advance. So the same control could be used with two robots, or a hundred robots. And the control would still work if two robots happen not to boot up at the start of the experiment. The video was taken from experiments conducted in the swarm-bots project (http://www.swarm-bots.org), which concluded in 2005. In the Ascens project we will be using a robot with a similar form factor, but with much more advanced sensors, actuators and computational abilities (see previous post http://blog.ascens-ist.eu/2011/03/ensembles-and-mobile-robots-what-is-the-link/).
This kind of distributed control has the potential to provide flexible, robust systems. The problem is that to date, swarm robotic systems tend to be designed in an ad-hoc fashion, based largely on the intuition of the system designer. It is very hard to predict in advance what such systems will do, or to be able to provide any formal guarantees about their behaviour. By the end of the ASCENS project, we hope to have some interesting solutions to this problem.