Distributed Exploration with a Robot Swarm
Engineering Robot Swarms
Large multi-robot systems (robot swarms) have the potential to display desirable properties, such as robustness to individual failures through redundancy, and enhanced performance through parallelism and cooperation. Realizing such potential is challenging because of the lack of sound design methodologies.
In the literature, coordination among multiple robots has been achieved in several ways. Existing approaches span from complete centralization to complete decentralization, with hybrid centralized-decentralized systems in between. With complete centralization, a master system must collect the data from the robots, analyze it and send the actions to perform to each robot. In many applications, the advantages of this approach do not counterbalance its drawbacks. Although centralized control is usually simpler to design and can result in a globally optimized behavior, it suffers from poor robustness (the master system is a single point of failure) and poor scalability (the master system's CPU and network connectivity are shared resources), and it requires global sensing and communication (which is not always available).
In contrast, completely distributed coordination algorithms do not exploit any kind of master system, global knowledge, or planning. Instead, coordination is the result of the parallel pairwise interactions of the system's components. Completely distributed coordination algorithms achieve scalability through local sensing and communication, and achieve robustness and high performance by leveraging the natural parallelism and redundancy of the system. However, it is very hard to design effective coordination algorithms of this kind.
A promising approach to the design of swarm robotics systems is a combination of behavior-based (compositional, pattern-based) aspects and automatic procedures (not restricted to optimization methods). The work in the ASCENS project followed the line of research that leads to the definition of such a combined approach.
Awareness and Adaptation in Robot Swarms
The notions of awareness and adaptation in robot swarms can manifest themselves at the individual level and at the ensemble level. For the purposes of ASCENS, our primary focus is modeling and achieving ensemble-level awareness and adaptation. However, the two levels are deeply intertwined---a study of ensemble awareness/adaptation cannot neglect the individual level. Individual awareness and adaptation can be defined as the ability of the robot to estimate its own state, as well as a relevant portion of the ensemble state, and react effectively to state changes. By relevant portion, here we mean that the robot must be capable of retrieving enough information about the ensemble state to make decisions leading to correct ensemble behaviors. Ensemble awareness and adaptation refer to the capability of the ensemble to behave as a coherent unit, by distributing information correctly and acting in a coordinated fashion.
The relationship between the individual and the ensemble levels is complex. For instance, a high degree of individual awareness is not required to produce complex ensemble behaviors which display high degrees of awareness. Research on social insects show that individuals following simple rules based on short-range information about the environment are capable of highly complex and efficient behaviors such as nest construction and food foraging. The algorithm described in the next section is an example of an individual behavior based on short-range information and little individual awareness that result in a complex ensemble behavior.
Scenario: Exploration of an Unknown Environment by a Robot Swarm

The application scenario can be summarized as disaster recovery. We imagine that a disaster happened, such as the catastrophic failure of a nuclear plant, or a major fire in a large building. We also imagine that an activity of search-and-rescue must be performed. For instance, people may be trapped inside the building and they must be found and brought to safety. Given the high danger of operating in such environment, it is realistic to think that an ensemble of robots could be used to perform the most dangerous activities. Among these activities, two are the focus of our attention: exploring the environment and finding targets to rescue.
The environment is a large rectangular area structured by several walls. The victims to find are scattered throughout the environment. For the purposes of the ASCENS project, there was no real need to design a specific object to be retrieved. Thus, we used a robot that we suppose unable to move. The explorer robots are initially deployed in the gray deployment area.
A Fully Distributed Solution
We present a fully distributed algorithm for collective exploration. The algorithm works under the assumption that the robots are initially unaware of the whereabouts of the victims and of the structure of the environment. The concepts of awareness and adaptation play a fundamental role in this application.
In terms of awareness, the most important requirement is that the ensemble as a whole is capable of representing the current knowledge regarding the structure of the environment. The ultimate purpose of exploration is to allow a second set of robots, the rescuers, to reach the victims that need assistance.
To achieve this result, one could endow each robot with an algorithm for simultaneous localization and mapping (SLAM) and let the robots integrate each others' maps through communication. With this approach, the representation of the whole environment is a composition of the individual representations of each robot. While this approach is effective, it requires adequate sensing and computation capabilities on the robots. Moreover, this approach does not target the intrinsically distributed nature of the systems we studied throughout the project---in principle, a robot could solve the exploration task alone, given sufficient time and resources.
In this section we focus on an alternative solution, in which the robots construct a coherent collective representation of the environment without requiring SLAM capabilities. In terms of awareness, this algorithm demonstrates how little (or even zero) individual awareness can result in effective and coherent ensemble awareness.
The core idea behind the algorithm is to employ the robots as landmarks. A landmark robot occupies a specific location of the environment and maintains communication with a number of immediate neighboring landmarks. Upon receipt of a request for direction to a specific victim by a wandering robot, two situations can occur:
- The landmark can see the victim directly: in this case, the landmark sends the direction to the victim;
- The landmark cannot see the victim: in this case, the landmark propagates the request to its neighbors, and then picks the shortest suggested path
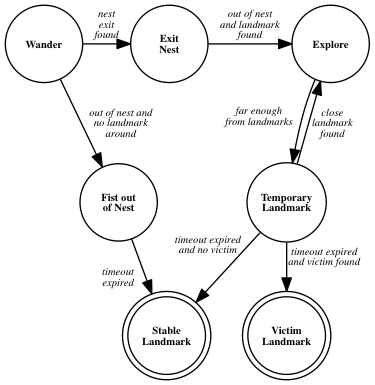
A diagrammatic representation of the algorithm is reported in the following figure, while the main phases of a typical execution of this behavior are illustrated in the subsequent snapshots of a simulation executed with the ARGoS simulator. The code itself is available here.
Phase 1: The first explorer exits the nest and becomes a stable landmark.
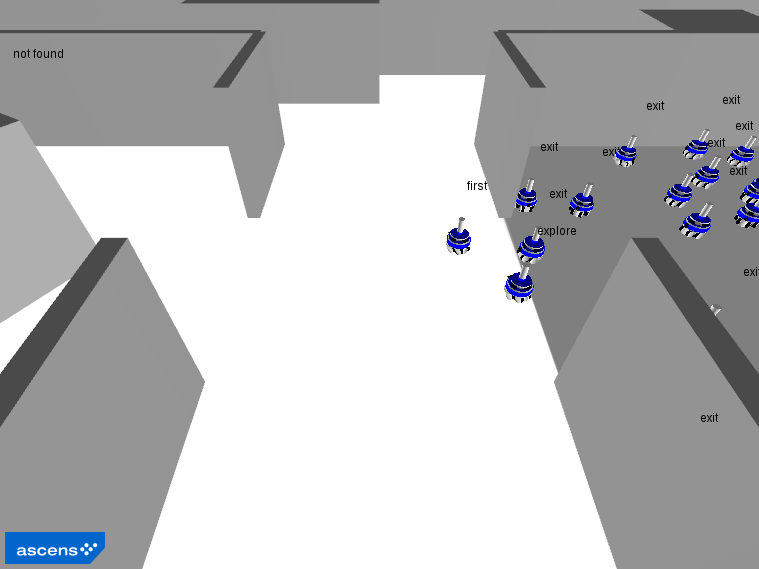
Phase 2: The other robots exit the nest.
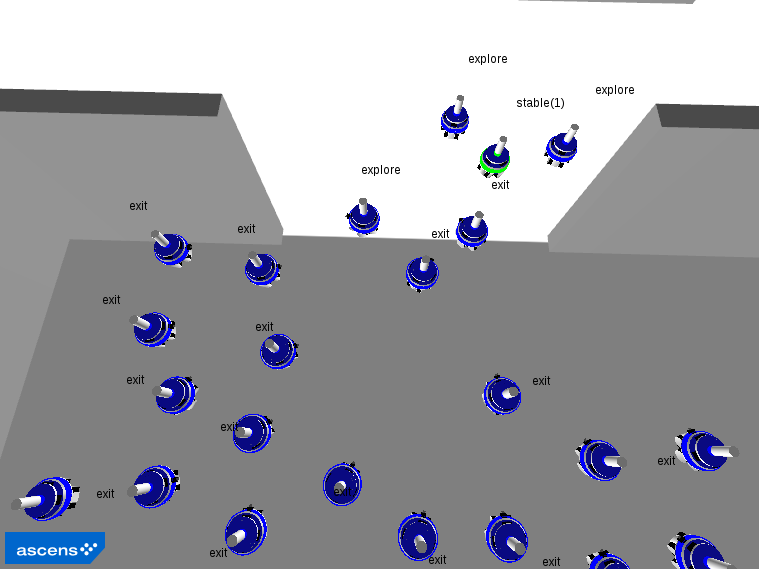
Phase 3: The explorers navigate the environment, occasionally becoming stable landmarks.
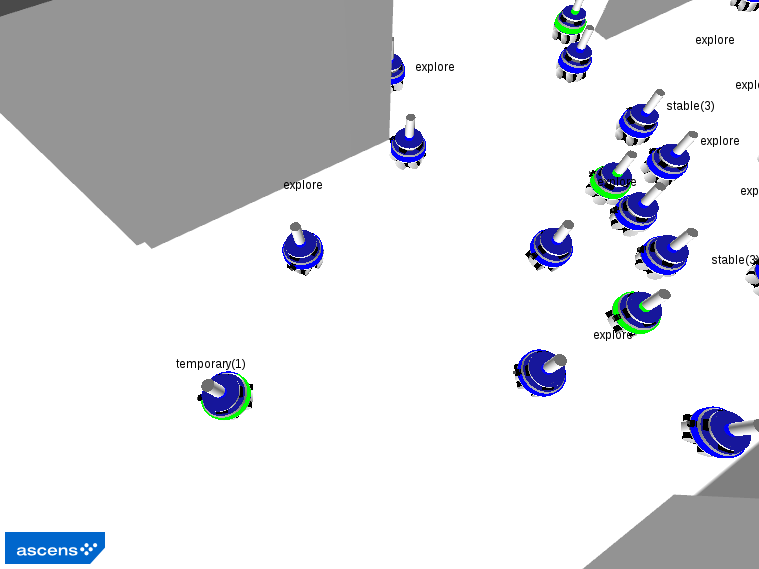
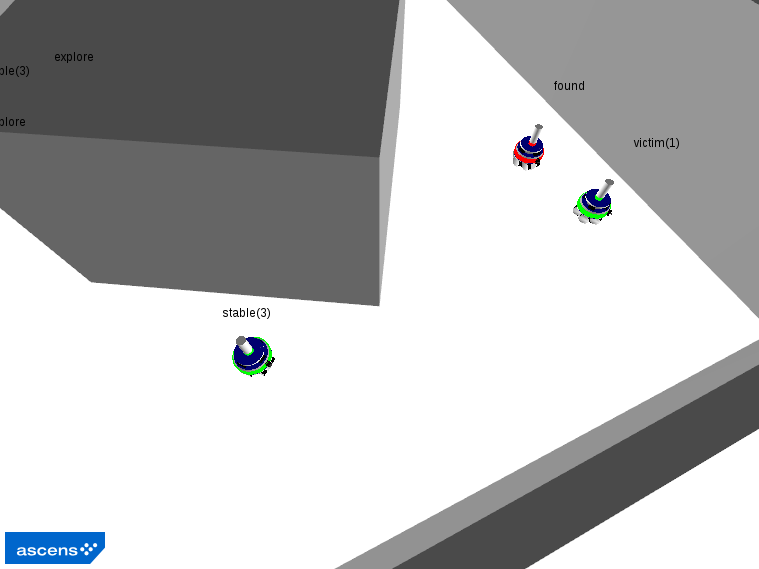
Phase 4: Explorers that are close to a victim become victim landmarks.