Can component policies be exploited by external reasoners?
In a scenario like the e-mobility one, e-vehicles should be equipped with reasoning units capable of dealing with unexpected events, like e.g., failure in booking a parking lot, traffic jams, or unavailability of booked parking lots. To react to these situations, appropriate actions should be determined and taken. We discuss the reasoning issue in the context of SCEL, a formal language developed to program autonomic computing systems in terms of the constituent components and their reciprocal interactions.
As shown in Figure 1, a SCEL autonomic component results from the interaction among knowledge and behavior components, according to specific policies. These provide a simple, yet expressive, linguistic tool for defining and enforcing rules to specify strategies, requirements, constraints, guidelines, etc. about the behaviour of systems and of their components.
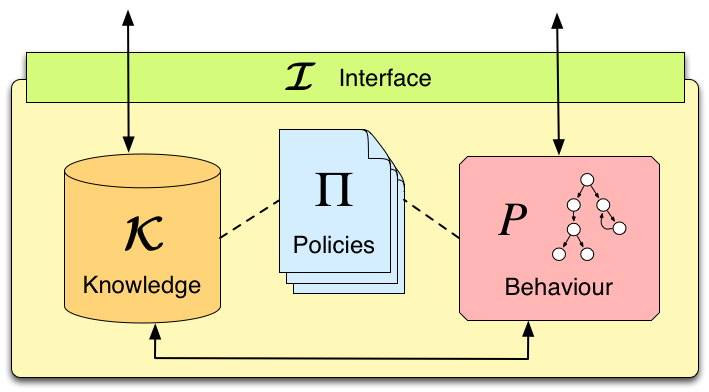
Figure 1: SCEL component
Policies may depend on the values of components' attributes (reflecting the status of components and their context) and can be dynamically modified for better reacting to system or environment changes. Moreover, as an effect of policy evaluation, specific actions, implementing adaptation strategies, can be produced at run-time and used to modify the behaviour of components.
Therefore, policies provide a simple form of self- and context-aware reasoning, supporting the achievement of self-* properties of the autonomic system. For example, when an e-vehicle is looking for available parking lots in nearby car parks, an internal policy could be used to ignore both parkings not equipped with charging station if the e-vehicle has a low battery level, and parkings with a cost per hour greater than a maximum cost established by the driver.
However, more sophisticated reasoning machineries can be necessary to deal with specific circumstances or when concerned with specific application domains. In these cases, separate reasoning units can be used by SCEL programs whenever decisions have to be taken.
Different reasoners, designed and optimised for specific purposes, can be exploited according to the components needs. Specifically, whenever SCEL systems have to take decisions, they have the possibility of invoking an external reasoner to receive informed suggestions about how to proceed. These answers would rely on the provided information about the relevant knowledge systems have access to and about their past behavior.
For example, in case of an unexpected event in the e-mobility scenario, a reasoner could be exploited by e-vehicles to dynamically re-plan their journey. Intuitively, the list of points-of-interest to be visited should be provided to the reasoner, which would shuffle it following some criteria, and would return the obtained list to the SCEL component that required it.
Figure 2 depicts such an enriched SCEL component, together with a generic external reasoner R. With respect to Figure 1, now local communications are filtered by a reasoner integrator RI (see post "Reasoning about reasoning agents").
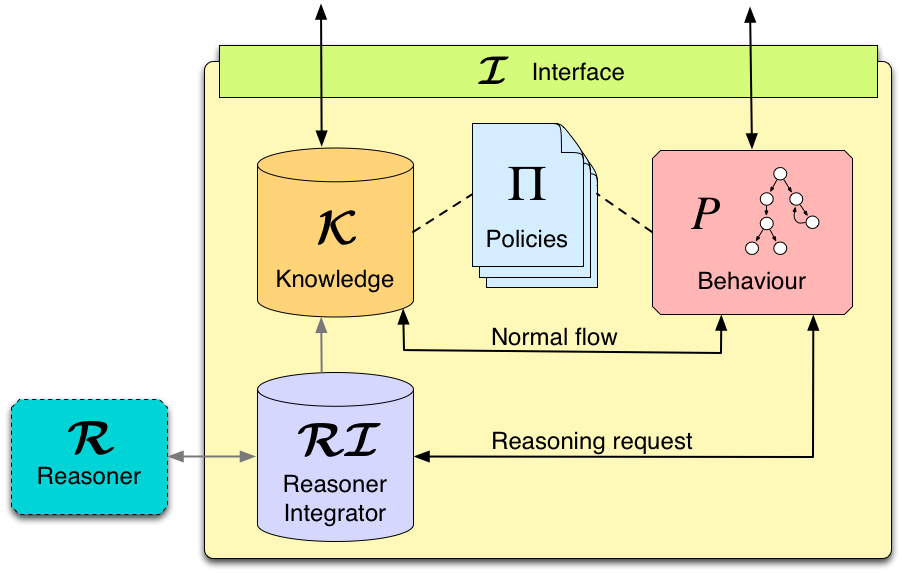
Figure 2: SCEL component with external reasoner
What we envisage is using policies not only for regulating components interaction, but also for managing the use of external reasoners. Policies could instruct the reasoners according to specific conditions on the internal status of the component and on external factors. For example, policies could urge the reasoner to return a solution as soon as possible, thus avoiding an exhaustive search. Moreover, policies could act as a filter for input data sent to the reasoner (e.g., sensible information about the driver could be removed from his profile before passing it to the reasoner), as well as for output data (e.g., actions returned by the reasoner could be blocked if they violate the e-vehicle polices). Anyway, as shown in Figure 3, how to reconcile policing and external reasoning is still an open issue.
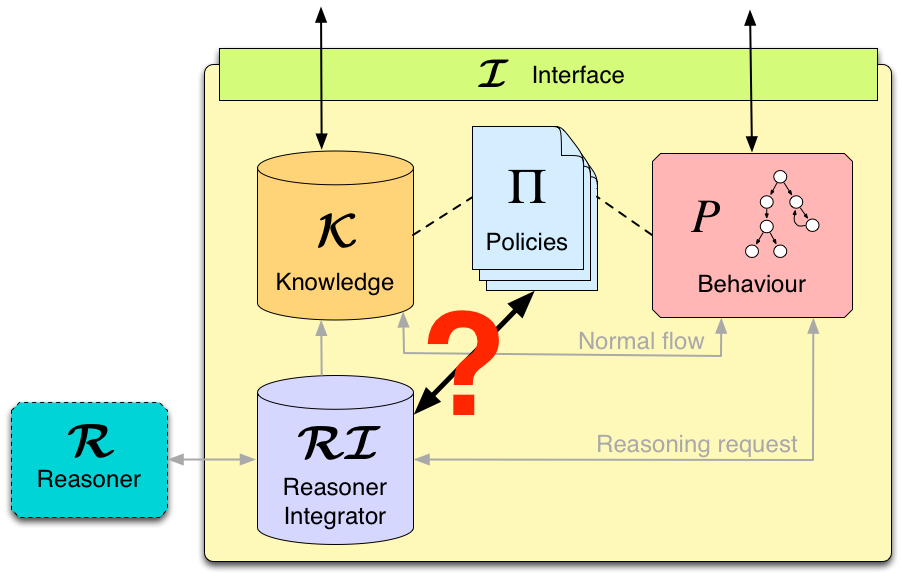
Figure 3: integration between policies and external reasoner
To tackle this issue, we should first be able to conceive under which conditions policies can help the reasoners, and to define appropriate interactions protocols between reasoners and policies handlers.
Rocco De Nicola and Francesco Tiezzi
IMT, Lucca