A gripper module for collaborative manipulation and construction
 The group of marXbots robots used for validation of swarm algorithms in the ASCENS project has been equipped with a gripper module enabling collaborative manipulation and construction.
The group of marXbots robots used for validation of swarm algorithms in the ASCENS project has been equipped with a gripper module enabling collaborative manipulation and construction.
You can observe just above the robot equipped with the gripper and below the CAD version of the module.
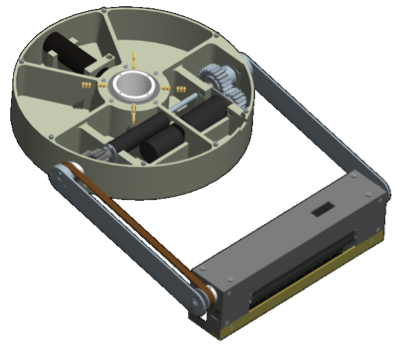
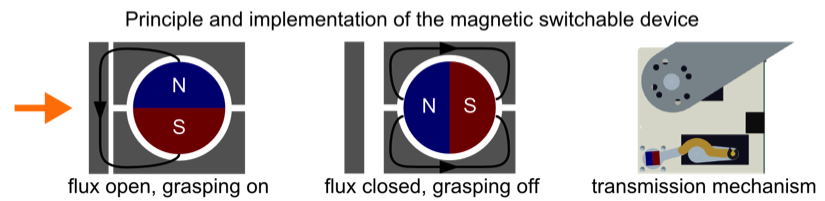
The module is a magnetic gripper that allows taking ferromagnetic objects. It is based on a magnetic switch that can either attract the objects or not, depending on its configuration. To change the configuration, the magnet can be rotated inside a ferromagnetic structure that conducts the flux inside or outside of it, in respect of the magnet position.This generate an external attraction or not, allowing to grasp or not the objects. The switch between configurations is made by a motor.
In the following figure you can see the magnetic principle of the switch:
This gripper module has a total of tree degrees of freedom in addition of the magnetic switch. The first one is the rotation of the arm in respect to the body of the robot. This is important to precisely manipulate objects and structures, it is also primordial if you want that several robots grasp the same object and move it collaboratively. Sliding connectors allow rotating continuously.
The second degree of freedom is the lifting movement of the arm. This degree of freedom is powerful enough to lift more than 100g and bring objects to a position higher than the robot size.
The third degree of freedom is the tilt of the hand, for instance allowing to keep horizontal a cube used in the construction of walls.
The gripper module has several sensors:
- All degrees of freedom have position and torque feedback, allowing control in position, speed and torque.
- There are 22 IR proximity sensors on the gripper. 10 are located in front, 10 under and 2 on each side of the gripper.
- In the front of the gripper we have designed a RFID reader and writer, very interesting for the recognition of objects.
- On the arm there is a force sensor that measures the lateral bending of it.
Here a CAD overview of this mechatronic system:
![]()
The gripper that has been developed in ASCENS is a key element to progress the exploration of robotic technologies. Here an example of manipulation of objects:
Author Michael Bonani, Francesco Mondada
Distributed Exploration with a Robot Swarm
Engineering Robot Swarms
Large multi-robot systems (robot swarms) have the potential to display desirable properties, such as robustness to individual failures through redundancy, and enhanced performance through parallelism and cooperation. Realizing such potential is challenging because of the lack of sound design methodologies.
In the literature, coordination among multiple robots has been achieved in several ways. Existing approaches span from complete centralization to complete decentralization, with hybrid centralized-decentralized systems in between. With complete centralization, a master system must collect the data from the robots, analyze it and send the actions to perform to each robot. In many applications, the advantages of this approach do not counterbalance its drawbacks. Although centralized control is usually simpler to design and can result in a globally optimized behavior, it suffers from poor robustness (the master system is a single point of failure) and poor scalability (the master system's CPU and network connectivity are shared resources), and it requires global sensing and communication (which is not always available).
In contrast, completely distributed coordination algorithms do not exploit any kind of master system, global knowledge, or planning. Instead, coordination is the result of the parallel pairwise interactions of the system's components. Completely distributed coordination algorithms achieve scalability through local sensing and communication, and achieve robustness and high performance by leveraging the natural parallelism and redundancy of the system. However, it is very hard to design effective coordination algorithms of this kind.
A promising approach to the design of swarm robotics systems is a combination of behavior-based (compositional, pattern-based) aspects and automatic procedures (not restricted to optimization methods). The work in the ASCENS project followed the line of research that leads to the definition of such a combined approach.
Awareness and Adaptation in Robot Swarms
The notions of awareness and adaptation in robot swarms can manifest themselves at the individual level and at the ensemble level. For the purposes of ASCENS, our primary focus is modeling and achieving ensemble-level awareness and adaptation. However, the two levels are deeply intertwined---a study of ensemble awareness/adaptation cannot neglect the individual level. Individual awareness and adaptation can be defined as the ability of the robot to estimate its own state, as well as a relevant portion of the ensemble state, and react effectively to state changes. By relevant portion, here we mean that the robot must be capable of retrieving enough information about the ensemble state to make decisions leading to correct ensemble behaviors. Ensemble awareness and adaptation refer to the capability of the ensemble to behave as a coherent unit, by distributing information correctly and acting in a coordinated fashion.
The relationship between the individual and the ensemble levels is complex. For instance, a high degree of individual awareness is not required to produce complex ensemble behaviors which display high degrees of awareness. Research on social insects show that individuals following simple rules based on short-range information about the environment are capable of highly complex and efficient behaviors such as nest construction and food foraging. The algorithm described in the next section is an example of an individual behavior based on short-range information and little individual awareness that result in a complex ensemble behavior.
Scenario: Exploration of an Unknown Environment by a Robot Swarm

The application scenario can be summarized as disaster recovery. We imagine that a disaster happened, such as the catastrophic failure of a nuclear plant, or a major fire in a large building. We also imagine that an activity of search-and-rescue must be performed. For instance, people may be trapped inside the building and they must be found and brought to safety. Given the high danger of operating in such environment, it is realistic to think that an ensemble of robots could be used to perform the most dangerous activities. Among these activities, two are the focus of our attention: exploring the environment and finding targets to rescue.
The environment is a large rectangular area structured by several walls. The victims to find are scattered throughout the environment. For the purposes of the ASCENS project, there was no real need to design a specific object to be retrieved. Thus, we used a robot that we suppose unable to move. The explorer robots are initially deployed in the gray deployment area.
A Fully Distributed Solution
We present a fully distributed algorithm for collective exploration. The algorithm works under the assumption that the robots are initially unaware of the whereabouts of the victims and of the structure of the environment. The concepts of awareness and adaptation play a fundamental role in this application.
In terms of awareness, the most important requirement is that the ensemble as a whole is capable of representing the current knowledge regarding the structure of the environment. The ultimate purpose of exploration is to allow a second set of robots, the rescuers, to reach the victims that need assistance.
To achieve this result, one could endow each robot with an algorithm for simultaneous localization and mapping (SLAM) and let the robots integrate each others' maps through communication. With this approach, the representation of the whole environment is a composition of the individual representations of each robot. While this approach is effective, it requires adequate sensing and computation capabilities on the robots. Moreover, this approach does not target the intrinsically distributed nature of the systems we studied throughout the project---in principle, a robot could solve the exploration task alone, given sufficient time and resources.
In this section we focus on an alternative solution, in which the robots construct a coherent collective representation of the environment without requiring SLAM capabilities. In terms of awareness, this algorithm demonstrates how little (or even zero) individual awareness can result in effective and coherent ensemble awareness.
The core idea behind the algorithm is to employ the robots as landmarks. A landmark robot occupies a specific location of the environment and maintains communication with a number of immediate neighboring landmarks. Upon receipt of a request for direction to a specific victim by a wandering robot, two situations can occur:
- The landmark can see the victim directly: in this case, the landmark sends the direction to the victim;
- The landmark cannot see the victim: in this case, the landmark propagates the request to its neighbors, and then picks the shortest suggested path
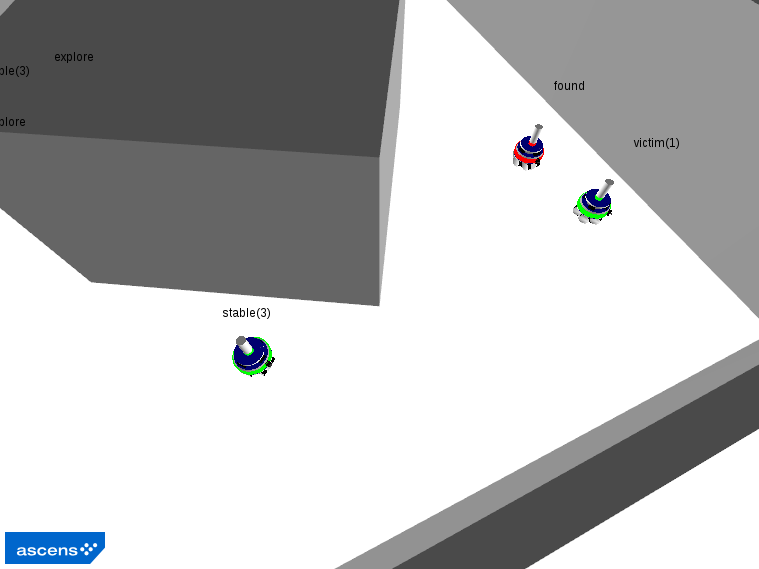
A diagrammatic representation of the algorithm is reported in the following figure, while the main phases of a typical execution of this behavior are illustrated in the subsequent snapshots of a simulation executed with the ARGoS simulator. The code itself is available here.
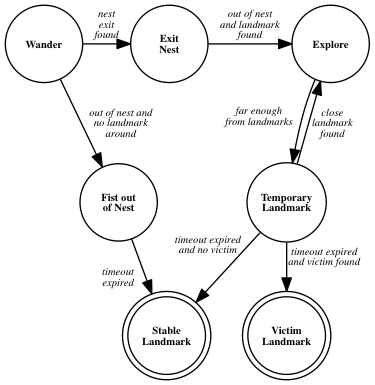
Phase 1: The first explorer exits the nest and becomes a stable landmark.
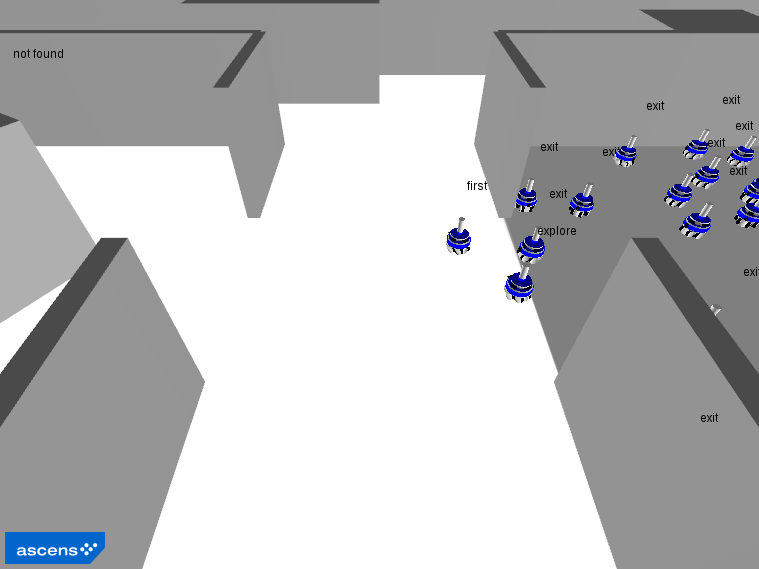
Phase 2: The other robots exit the nest.
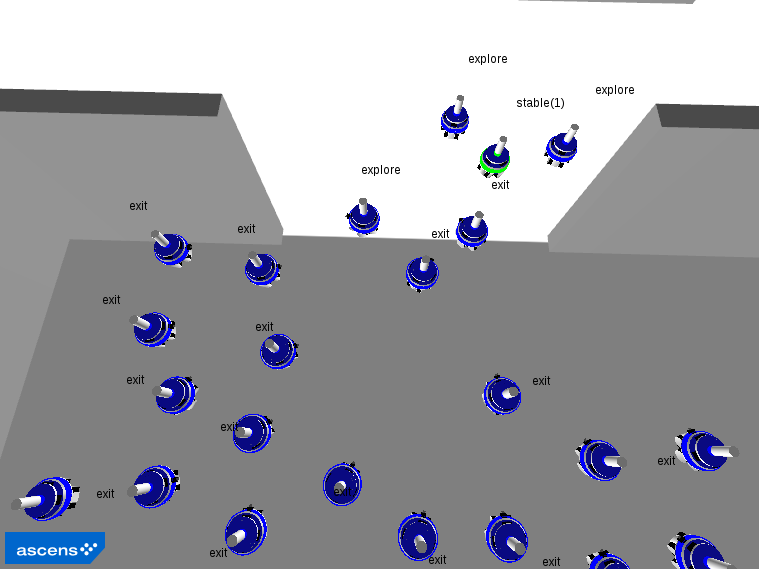
Phase 3: The explorers navigate the environment, occasionally becoming stable landmarks.
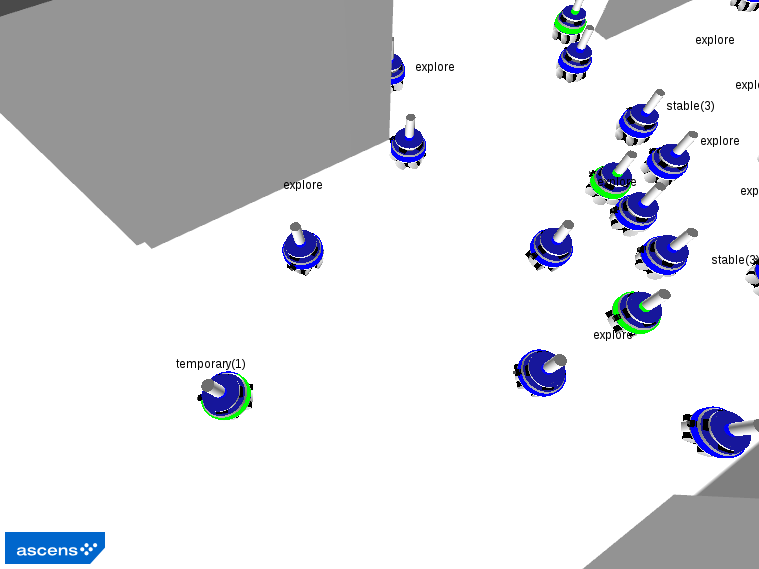
Phase 4: Explorers that are close to a victim become victim landmarks.
Beauty is in the eye of the beholder
The challenges of controlling the robot behavior in performing certain task can best be understood if seen from the robot perspective. The complexity does not necessarily come from the task itself, but rather from the interaction that goes on between the robot sensory system, environment and robot performance. The ASCENS project provides technology for autonomous behavior that can nicely be illustrated by a multi-robot control system. To show some of the project results we set a scenario where a human competes with an autonomous robot controlled by ASCENS software. The task is to find “building blocks” in a closed area and to construct a wall at a designated place. Of course a sensory system of the robots is less sophisticated than ours, thus we reduced the vision (perception) of the human competitor to the sensory system of the robot, giving the competitors equal chances. Both competitors have exactly the same information about environment. Who would perform better?

ASCENS philosophy: simplifying complexity
ASCENS explores perception, adaptation and self-organization offering high-level methods and practical tools for developing intelligent service-component ensembles that organize themselves and act autonomously. Under the motto simplifying complexity, the technological challenge is in controlling the dynamics of the emergent environments. Often we deal with massively parallel systems where harmonizing the communication and optimizing individual and collective goals is a major challenge. For example, how to build a powerful cloud platform that turns a huge number of simple devices into a super computer, or how to optimally organize mobility with electric vehicles taking into account battery restrictions, multiple itineraries and traffic conditions, or how to organize a rescue operation with self-aware and self-healing robot swarms.
The ASCENS approach to such complexity is to deal with issues at a local level, solving problems at a smaller scale and then harmonizing these solutions with more global ones. More concretely, a communication is organized in an implicit manner, who talks to whom is decided in run-time, depending on the current needs and situation. Thus, ASCENS approach decomposes complex systems into small service components (with clearly defined local goals) and then construct larger groups, called ensembles that fulfill collective goals. A criteria to construct an ensemble is a condition i.e. some “more global circumstance”, e.g. “ connect all robots that can carry 4kg and are in the radius of 100m – the goal is to jointly transport 15kg heavy object”. Having the knowledge as a major criterion for communication leads to self-awareness (where awareness can be defined as the knowledge of own functional and operational requirements and states). Making ASCENS components and ensembles aware of their own capabilities and goals ensures adaptive and autonomous behavior at runtime.
ASCENS approach: both pragmatic and formal
Pragmatic orientation means building autonomous systems that do practical things, like autonomous robot swarms performing rescue operation, autonomous cloud computing platforms transforming numerous small computers into a super computing environment or autonomous e-mobility support that ensures energy-aware transportation services. In reality, autonomous behavior means functioning without human intervention, seamlessly using own rules and criteria. At runtime, the more autonomy the system exhibits the less obvious it appears to outside observers. Thus to be sure about correct functioning of such systems it is necessary to develop formal methods and tools that can ensure not only that an autonomous system really does what it is supposed to do, but also that important conditions of the whole controlled environment are never violated. ASCENS offers a range of formal means that ensure modeling, formal reasoning, validation and verification of complex controlled systems, both in its design and at runtime.
ASCENS at ICT 2013 – science and joy
The picture below shows our stand at ICT 2013. Our team put enormous effort to make the robot versus human competition system, fine-tuned just for ICT 2013 purposes. Not only that both robots - ASCENS and human controlled - worked perfectly, the response of the audience has been rewarding. We are having many visitors, hundreds of questions and a lot of fun!

Nikola Serbedzija
Fraunhofer, Fokus
Which is the best robotic scenario to test our ensembles?
This question is a recurrent one in many projects dealing with mobile robotics and there is no largely recognized benchmarking scenario. Often the validation scenarios are adapted to the approach of the project, allowing to better show the performances of the proposed approach, of course. In ASCENS we have a different goal: we need a scenario where the various parameters can be modulated, where we can check a global approach and meet several challenges: modeling of complex environments or tasks, optimization, need for adaptation, fault tolerance, task allocation, constrains satisfaction, etc. Moreover the scenario has to be implemented both in simulation and on real robots.
Although not recognized as a benchmarking scenario in the whole mobile robotics community, "foraging" represent a class of tasks that is often used, especially in bio-inspired robotics. This task already includes coverage of an area, transportation and storage. These subtasks allow already dealing with task allocation and resources optimization challenges, for instance. Despite all this, we still found this task too simple and decided to add one interesting constraint: an external toxic source, potentially damaging the robots themselves. The final scenario looks very much like a "search and rescue" scenario, described in the following illustration:
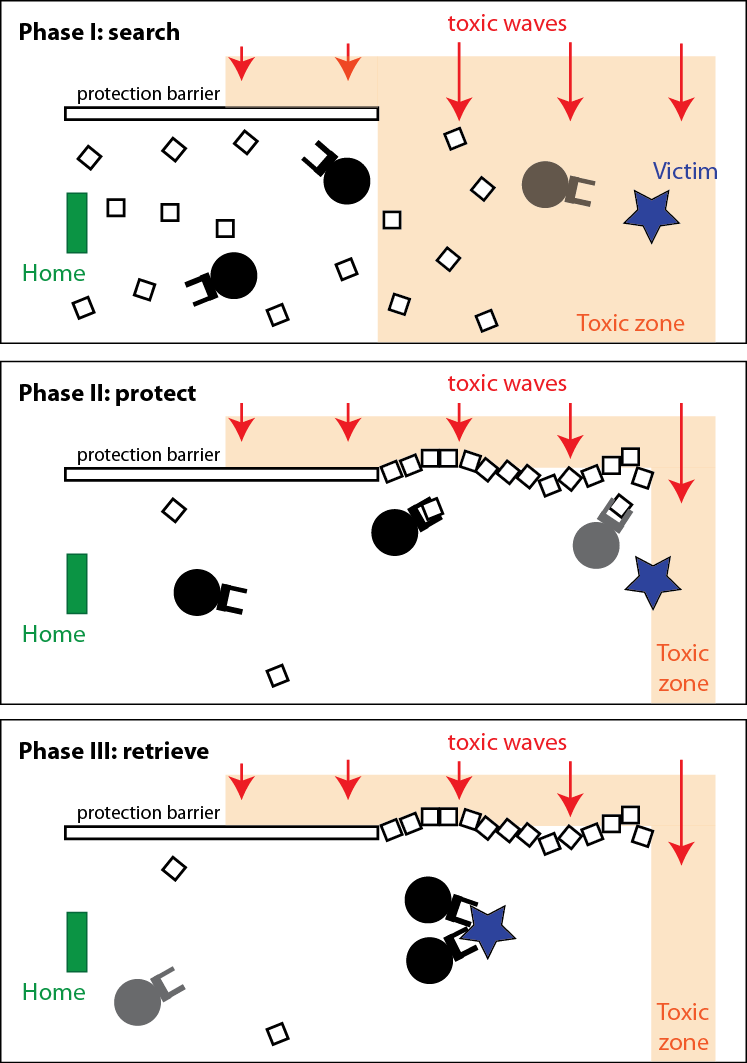
Illustration of the rescuing scenario in three phases.
In this scenario we have a home and a victim to rescue in a toxic environment. The home is in a safe zone protected from the toxic waves by a protection wall. The victim is in a zone exposed to the toxic waves. Within the environment there are construction blocks that can be used to build protection walls. The goal is to bring the victim to the home. We can split the whole mission in three phases: search, protect and retrieve.
This scenario is very interesting because it allows exploring, among others:
- Various types of tasks such as exploration, target location, transport of building blocks, construction and collective transport of large objects.
- Sequential as well as parallel actions. Robots can search and in parallel protect, or run these two phases in a sequential way.
- Task allocation, as robots could have different tasks.
- Optimization of resources, as robots have limited resources and could be damaged by the toxic waves.
- Bio-inspired as well as classical AI approaches.
- Simulated and real implementations, as all elements of the scenario can be implemented using our marXbot robots. The toxic waves can be implemented using a lateral light source, colored or modulated.
All these aspects can be pushed to the highest complexity, or reduced to permit simple solutions, depending on the focus of the research. We believe that we have here all the components to generate a set of compatible scenarios that can, combined, address a class of real-world applications.
Francesco Mondada and Michael Bonani
ASCENS in Quest of Awareness-Rich Technology
The ASCENS project aims at bringing awareness into technical systems. Formalisms, linguistic constructs and programming tools should be developed featuring high level of autonomous and adaptive behavior. Rigorous and sound concepts will be used to reason and prove system properties, but how can we judge the project’s pragmatic significance? The impact and practical value of the ASCENS project results will be evaluated on e-mobility, cloud computing and swarm robotics application domains. The three novel application domains look complex and fairly different and one may ask: isn’t each problem difficult enough? Why solving all three at once?
1. What E-mobility, Cloud Computing and Swarm of Robots Have in Common?
E-mobility is a vision of future transportation by means of electric vehicles network allowing people to fulfill their individual mobility needs in an environmental friendly manner.
Cloud computing is an approach that delivers computing (resources) to users in a service-based manner, over the internet.
Swarm robotics deals with creation of multi-robot systems that through interaction among participating robots and their environment can accomplish a common goal, which would be impossible to achieve by a single robot.
At a first glance e-cars and transportation, distributed computing on demand and swarm robotics have nothing in common!
1.1 Sharing and Collectiveness
In order to cover longer distances, an e-vehicle driver must interrupt the journey to either exchange or re-charge the battery. Energy consumption has been the major obstacle in a wider use of e-vehicles. Alternative strategy is to share e-vehicles in a way that optimizes the overall mobility of people and the spending of energy. In other words: when my battery is empty – you will take me further if we go towards the same location and vice versa.
The processing statistics show that most of the time computers are idle – waiting for input to do some calculations. Computers belong amongst fastest and at the same time most wasted devices man has ever made. And they dissipate energy too. Cloud computing overcomes that problem by sharing computer resources and making them better utilized. In another words if my computer is free – it can process your data and vice versa; or even better, let us have light devices and leave a heavy work for the cloud.
A swarm indicates a great number of things in motion. Swarm robots dynamically form different shapes in order to solve a collective assignment. Swarm of robots can perform much more as a group than any single element can do on its own. In other words, what we cannot achieve alone, we may manage together.
At a closer look “sharing and collectiveness” are common characteristics of all three application domains!
1.2 Awareness and Knowledge
E-mobility can support coordination only if e-vehicles know their own restrictions (battery state), destinations of users, re-charging possibilities, parking availabilities, the state of other e-vehicles nearby. With such knowledge collective behavior may take place, respecting individual goals, energy consumption and environmental requirements.
Cloud computing deals with dynamic (re-)scheduling of available (not fully used) computing resources. Maximal utilization can only be achieved if the cloud is “aware” of the users’ processing needs and the states of the deployed cloud resources. Only with such a knowledge a cloud can make a good utilization of computers while serving individual users needs.
Each robot in a swarm needs to know its own and the others’ location and capabilities as well as an overall assignment. Only then a swarm can achieve the common goal.
At a closer look “awareness” of own potentials, restrictions and goals as well as those of the others is a common characteristic. All three domains require self-aware, self-expressive and self-adaptive behavior.
1.3 Dynamic and Distributed Optimization
E-mobility is a distributed network that manages numerous independent and separate entities such as e-vehicles, parking slots, re-charge stations, drivers. Through collective and awareness-rich control strategy the system may dynamically re-organize and optimize the use of energy while satisfying users’ transportation needs.
Cloud computing actually behaves as a classical distributed operating system with a goal to maximize operation and throughput and minimize energy consumption, performing tasks of multiple users.
Swarm robotics deals with coordination of a collection of individual robots in order to optimize control strategy through interaction among the robots and the environment.
At a closer look “dynamic and distributed optimization” is inherent characteristic of the control environment for all three application domains.
2. Again, What E-mobility, Cloud Computing and Swarm of Robots Have in Common?
Control systems for all the three domains have many common characteristics: they are highly collective, constructed of numerous independent entities that share common goals. Their elements are both autonomous and cooperative featuring a high level of self awareness and self expressiveness. A complex control system built out of such entities must be robust and adaptive offering maximal utilization with minimal energy and resource use.
3. What the three domains have to do with ASCENS Project?
Formal definition, programming and controlling of complex massively parallel distributed system that feature awareness, autonomous and collective behavior, adaptive optimization and robust functioning are grand challenges of computer science. These challenges are present in most of complex control systems and they are the motivation and inspiration for the ASCENS project. The consortium gathered scientists from different fields in effort to offer novel and scientifically sound concepts and approaches:
- SCE - service–component ensembles as means to dynamically structure independent and distributed system entities
- Modeling and formalization of the fundamental SCE properties as means to rigorously reason about autonomous behavior and aware-rich networking, proving that important system requirements hold
- linguistic support for programming SCEs, expressing awareness and exchanging knowledge among system entities
- adaptive and knowledge-rich software environments and tools, expressing and deploying self-awareness and self-expression in technical systems
(see the ASCENS project goal [http://www.ascens-ist.eu/]). Consequently three different application domains are selected to test the pragmatic significance of the envisaged project concepts and results.
4. What should be the impact of ASCENS Solutions?
The ASCENS project calls for a new generation of technical solutions (techno-sphere) that would be better integrated into our biosphere by mimicking some natural phenomena like awareness, swarm behavior and adaptation. The ultimate rationale is: our resources are not endless thus our technical innovations need to be optimized and self- and energy-aware. We cannot for ever allow ourselves a luxury of driving own cars (on a global earth with increasing population and decreasing energy resources); we cannot for ever allow ourselves the luxury of switching on powerful computers that waste energy without doing much processing. We cannot neglect the usefulness of a swarm behavior (so much present in the nature) that teaches us how simple element can perform complex endeavor in a collective effort. The nature obviously achieves perfection through simplicity. Can we mimic that?
As you do not buy a cow when you need milk, you do not need to possess a car if you want to have free mobility; you do not require a powerful computer if you have processing necessities, you do not need a complex robot if you want automatic assistant. We should be oriented to hire and be charged per use rather than to buy and possess things as this may be a proper way to optimize the use of our precious resources.
To make such a mental and behavioral transition we need better control systems. We hope the ASCENS approach with its generic solutions for a wide class of applications, is a grand step in this direction.
Robot Swarms – What can formal methods do?
Previous posts of this blog (see Ensembles and mobile robots, where is the link? and Robot Swarms – What can they do?) have convinced us that the swarm robotics case study is of great interest and importance to the ASCENS project. In fact, on the one hand, swarm robotic systems comfortably fit to the ASCENS notion of ensemble and, on the other hand, the lack of formal tools for designing, controlling and reasoning on such systems poses a major challenge to the ASCENS researchers. To meet this challenge, we intend to devise new formal methods and approaches capable of dealing with the distinctive aspects and the complexity of swarm robotic systems and, more in general, of autonomic service-component ensembles.
But what can formal methods actually do? We don't aim at providing here an exhaustive answer to this question, by making e.g. a tedious list of approaches, techniques and tools that we plan to use and/or develop in ASCENS. This post indeed wants to give just a taste of the use of formal methods in this setting. In particular, we present below a result of our first attempt at formalizing and analyzing a scenario of the ASCENS robotics case study.
The following video shows a (stochastic) simulation, based on the use of the language Klaim and some related tools, in which three robots are in charge of collectively transporting an object to a goal area.
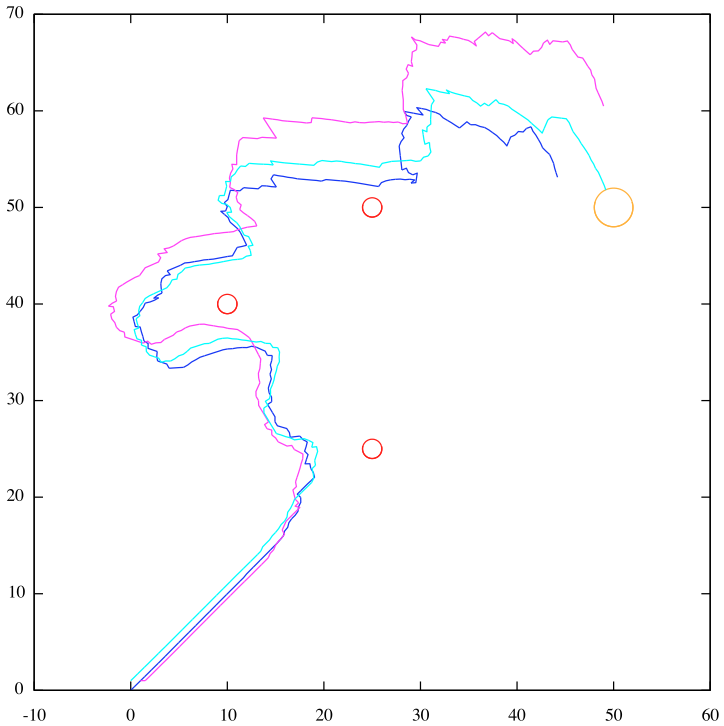
Robotics scenario in Klaim: result of a simulation (VIDEO)
Initially, the robots start moving towards the goal (i.e. the big circle in the upper-right corner). As soon as an obstacle enters into the range of their distance scanners, the robots change their directions and pass over the obstacle. This way, they reach without collisions the goal.
A formal study of such systems offers many advantages with respect to an experimental evaluation. Indeed, the latter approach is usually costly to organize, time consuming, incomplete and, sometimes, prohibitive in the design phase. Instead, a formal approach enables the exploration of several different situations and the prediction of the systems behavior.
Robot Swarms – What can they do?
Swarm robotics has been chosen as one of the three case studies of the ASCENS project. But why are robot swarms interesting, and why are they a useful case study for the ASCENS project? Our contention is that for many real-world problems, it is often more effective to use large cooperating teams of simple, cheap robots than to use a single complex robot. In Nature, ants can build complex nests that are orders of magnitude larger than a single ant, and whose construction lasts many ant lifetimes. Similarly, we envision future swarms of robots performing tasks autonomously, in a robust parallel way.
In the following video, a group of robots team up to transport an object that is too heavy for a single robot to move. Note that the control is distributed - the designer of the system set up simple rules to ensure that the robots would cooperate to move the object. But the rules are set up in such a way that the number of robots doesn't need to be specified in advance. So the same control could be used with two robots, or a hundred robots. And the control would still work if two robots happen not to boot up at the start of the experiment. The video was taken from experiments conducted in the swarm-bots project (http://www.swarm-bots.org), which concluded in 2005. In the Ascens project we will be using a robot with a similar form factor, but with much more advanced sensors, actuators and computational abilities (see previous post http://blog.ascens-ist.eu/2011/03/ensembles-and-mobile-robots-what-is-the-link/).
This kind of distributed control has the potential to provide flexible, robust systems. The problem is that to date, swarm robotic systems tend to be designed in an ad-hoc fashion, based largely on the intuition of the system designer. It is very hard to predict in advance what such systems will do, or to be able to provide any formal guarantees about their behaviour. By the end of the ASCENS project, we hope to have some interesting solutions to this problem.
Ensembles and mobile robots, where is the link?
Mobile robotics systems are complex artifacts composed of dozens of sensors, actuators, processors, processes, behaviors and even robots, if we consider robotic swarms. Mobile robots evolve mostly in complex unpredictable environments, interact with objects, infrastructures or even humans. Designing and controlling such systems and predicting their performances is a real challenge, where formal design tools are drastically missing. One goal of ASCENS is to provide the theoretical foundations and the technical tools to perform this design.
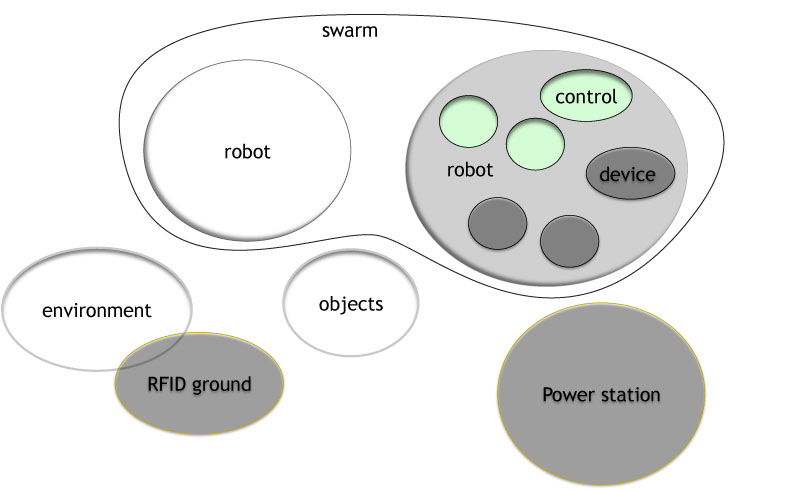
What is the link of this with ensembles? As mentioned in the first post of this blog: "Ensembles are software-intensive systems with massive numbers of nodes or complex interactions between nodes, operating in open and non-deterministic environments in which they have to interact with humans or other software-intensive systems in elaborate ways.". In robotics we can consider several types of nodes, depending on the level of abstraction one chooses. The hardware modules (intelligent sensors and actuators) of a robot can be considered as nodes within a single robot, interacting through a interconnection bus. Basic controlling behaviors that are combined to achieve the global behavior of a robot can also be considered as nodes, at a more abstract level. Abstracting even more, robots in a swarm can be considered as nodes within the swarm ensemble. One can even consider all these nodes simultaneously, building a hierarchical structures of nodes. This creates a massive number of nodes, fitting to the ensembles definition given above. The interactions between these nodes are complex, because of the complexity of the structure, of the global result and of the environment. The type of environment where robots evolve is non-deterministic and can include interaction with humans or others robots / artifacts, fitting again to the ensemble definition given above.

Therefore swarm robotics has been chosen as one of the three case studies of the ASCENS project. The robots used in this case-study is the marXbot, developed at EPFL. The marXbot has an internal distributed architecture, called ASEBA. The marXbot can interact with other robots, even physically by self-assembling in a bigger entity. Finally the marXbot supports interaction with specific environment systems, such as an RFID ground. Because of this large set of features, the marXbot robot is the ideal platform to implement and validate the concepts developed within ASCENS. Stay tuned for astonishing new approaches to robot control design!