Reasoning about reasoning agents
Ensembles are systems consisting of a massive number of components that have the ability to dynamically adapt to environments that may change heavily during runtime. They pose a number of challenges. On the one hand, parallel activities of many heterogeneous components calls for knowledge sharing and coordination. On the other hand, dealing with changing environments and nondeterministic behaviors requires enabling ensemble components to reason about actions to take and their impact.
Auto-scooter, or “how to avoid bumpings”
Consider a grid world with an arbitrary number of agents moving in it. At every time step, agents can move up, down, left, right or decide to stand still. We concentrate on a single, partially informed agent that wonders in the area paying attention to minimizing its collisions with other, randomly moving, agents. Our agent perceives local information about the environment, but up to a limited perception range and has to exploit the available information to minimize collision risk.
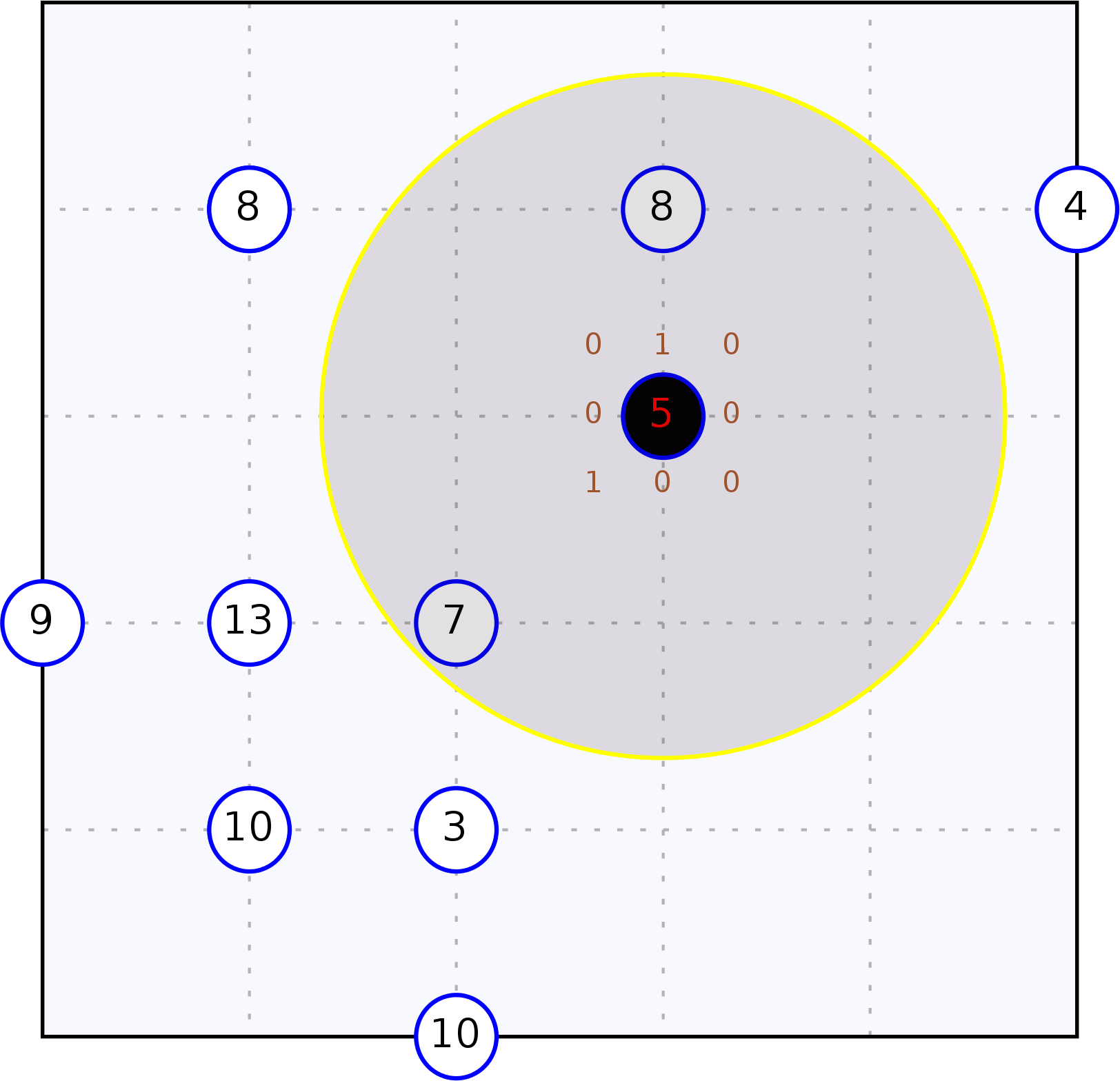
The figure depicts the scenario from a bird-eye perspective. The informed agent is the black circle surrounded by a wider semi-transparent circle representing its perception range. Blue circles represent randomly moving agents. Robots are labelled with their current number of collisions.
Modelling activities
In order to make an agent avoid others, as desired in the outlined scenario, it obviously has to move actively. The SCEL language [1] has been proposed to specify component behavior and to deal with the challenges that arise from the coordination of a massive number of components running in parallel. SCEL supports attribute-based communication and the management and sharing of information through tuple spaces that can for example serve as knowledge repositories. For the particular scenario, a SCEL implementation in the Maude language, MISSCEL, has been used to specify the informed agent's controller program. Maude provides a logical specification framework that allows to formally define the computational and deductional semantics of a language [2]; it also provides support for statistical model checking by the PVeStA tool [3].
Smart activities
In order to allow components to reason about actions to take, and thus to enable them to act autonomously and perform runtime adaptation, SCEL programs specifying components behavior can be connected to a reasoner. In the considered case study, the used reasoner is PiRLo [5], but the approach is viable for any reasoning system that can be triggered by a SCEL program via the tuple space. The fact that also PiRLo is written in the Maude language facilitates integration and allows for seamless usage with PVeStA. By using the formal approaches developed in the course of the ASCENS project, i.e., MISSCEL for modeling agents behaviors behavior and PiRLo for providing reasoning capabilities, it is possible to formally prove the quality of provided solutions. The PVeStA tool is used to generate measures that permit empirically comparing different solutions.
A headache: Formalisms integration
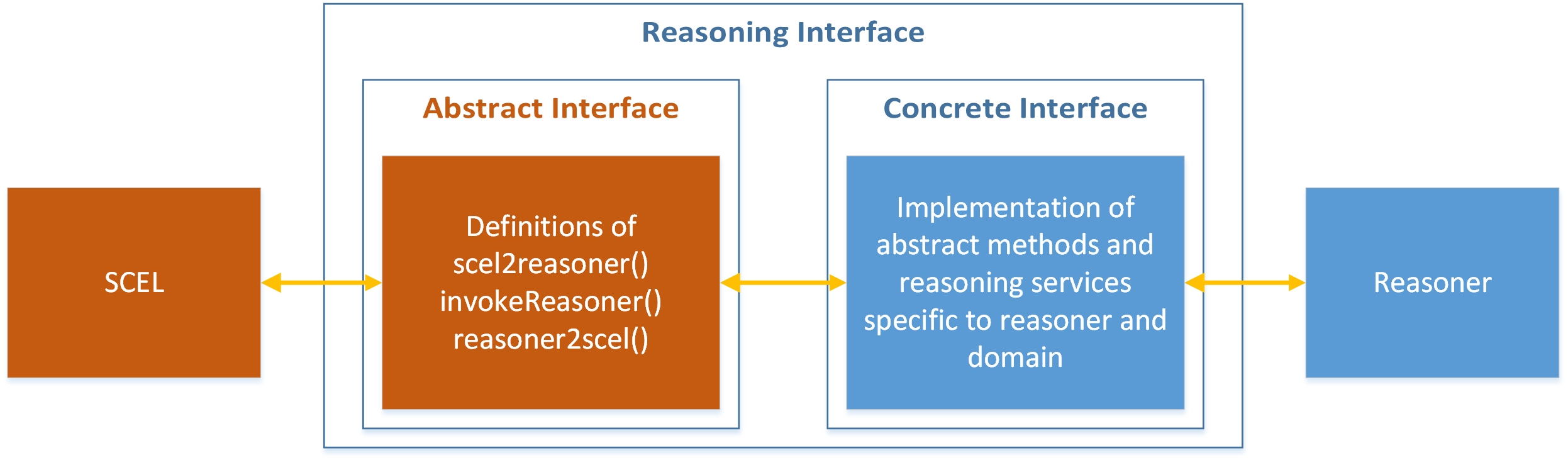
A common repository is used to integrate PiRLo with MISSCEL. There agents store their current perception and requests of specific services for the reasoner. When a SCEL program finds “reasoning tuples”, it invokes the reasoner via an abstract SCEL-reasoner interface. The wanted answer is obtained after three steps:
- Syntax and parameters of the reasoning request are translated from SCEL's representation to the reasoner's one.
- Reasoning is performed according to the requested reasoning service.
- Results provided by the reasoner are added to the tuple space of the requesting SCEL program.
Appropriate interfaces between the reasoner and SCEL guarantee a smooth interactions and hide implementation details of the adapter (consisting of both the abstract and the concrete interface). The figure below graphically outlines this approach.
At work!
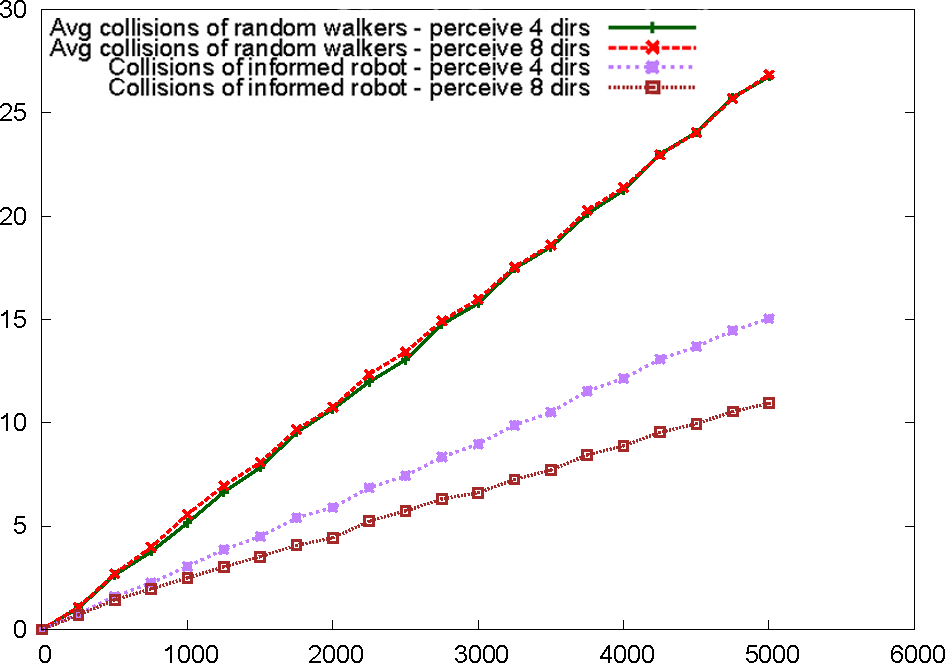
By providing a formal specification of the scenario in MISSCEL and PiRLo, it is possible to use a formal statistical model checking approach to empirically measure the quality of the proposed solutions. We implemented a SCEL program gathering information about the environment at every time step and triggering a reasoning service that provides the movement direction with the lowest probability of colliding with other agents. Upon receival of the wanted information, the informed agent moves as indicated by the reasoner. To evaluate the quality of the SCEL program, we measured the number of collisions detected in 5000 steps of simulation and compared the performance of our informed agent with that of an agent moving randomly. The figure below shows the results achieved by using the PVeStA statistical model checker. We considered two scenarios concerning an arena with 5*5 cells containing 10 normal robots and an informed one, all probabilistically distributed in the arena. In the first scenario the informed robot perceives only the four surrounding (4 dirs) positions while in the second it perceives also the positions along the diagonals (8 dirs). As one can would naturally expect, the integration of a reasoner improves the solution quality (i.e. reduces the numbers of collisions); through the presented approach of formal specification and statistical model checking, this intuitive result can also be proven empirically. The following image shows the results of the performed statistical analysis, while the video shows an exemplary simulation run.
The moral of the story
This blog presented an approach for rapid prototyping of service component ensembles that act autonomously in highly dynamic environments. To achieve this, component behavior has been specified in the MISSCEL implementation of the SCEL language and the PiRLo reasoner has been successfully integrated to MISSCEL via a well-defined interface to improve solution quality while maintaining separation of concerns. The presented approach for integration of reasoning via services is not limited to the particular implementations of SCEL or any reasoning component; it can be straightforwardly used for other implementations as well. As both the implementations of MISSCEL and PiRLo are realized in the Maude language, statistical model checking of provided solutions with the PVeStA model checker is straightforward. We provided evidence of the usefulness of the approach by comparing a solution exploiting the reasoner and one where agents only performs random movements.
A paper [5] detailing the results presented in this blog is under preparation.
In the future, we will look into hordes of reasoning agents (ensembles, yay!), e.g. by letting them explicitly talk to each other about their 'mental efforts'. Also, we could render the agents even smarter (yes, it is possible!), for example by providing them particular ontologies about the world they act in - already looking forward to some autoscooter-ontology.
If you'd like to know where we know all this from...
[1] De Nicola, R., Loreti, M., Pugliese, R., Tiezzi, F.: SCEL: a language for autonomic
computing. Tech. rep. (January 2013)
[2] Clavel, M., Duran, F., Eker, S., Lincoln, P., Marti-Oliet, N., Meseguer, J., Talcott,
C.L.: All About Maude, LNCS, vol. 4350. Springer (2007)
[3] AlTurki, M., Meseguer, J.: PVeStA: A parallel statistical model checking and
quantitative analysis tool. In: Corradini, A., Klin, B., Cîrstea, C. (eds.) CALCO
2011. LNCS, vol. 6859, pp. 386-392. Springer (2011)
[4] Belzner, L.: Action Programming in Rewriting Logic, to appear
[5] Rewriting Logic and Autonomic Computing: Modelling and Reasoning about Service Component Ensembles, by L. Belzner, R. De Nicola, A. Vandin and M. Wirsing, under preparation