Ensembles and mobile robots, where is the link?
Mobile robotics systems are complex artifacts composed of dozens of sensors, actuators, processors, processes, behaviors and even robots, if we consider robotic swarms. Mobile robots evolve mostly in complex unpredictable environments, interact with objects, infrastructures or even humans. Designing and controlling such systems and predicting their performances is a real challenge, where formal design tools are drastically missing. One goal of ASCENS is to provide the theoretical foundations and the technical tools to perform this design.
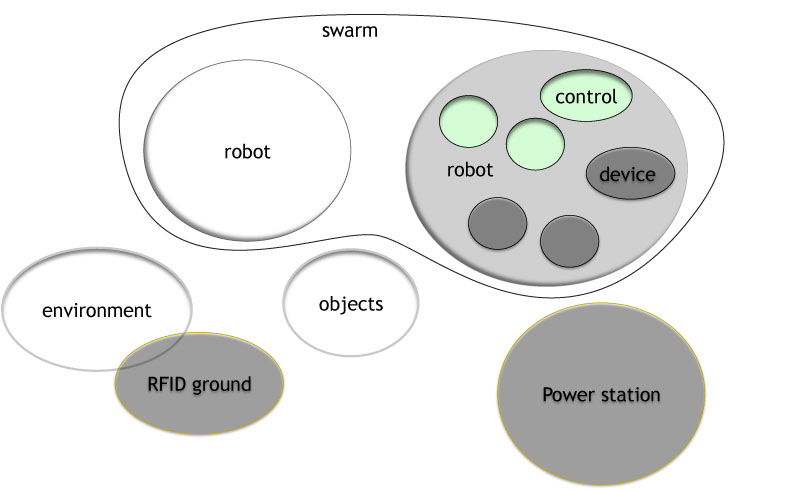
What is the link of this with ensembles? As mentioned in the first post of this blog: "Ensembles are software-intensive systems with massive numbers of nodes or complex interactions between nodes, operating in open and non-deterministic environments in which they have to interact with humans or other software-intensive systems in elaborate ways.". In robotics we can consider several types of nodes, depending on the level of abstraction one chooses. The hardware modules (intelligent sensors and actuators) of a robot can be considered as nodes within a single robot, interacting through a interconnection bus. Basic controlling behaviors that are combined to achieve the global behavior of a robot can also be considered as nodes, at a more abstract level. Abstracting even more, robots in a swarm can be considered as nodes within the swarm ensemble. One can even consider all these nodes simultaneously, building a hierarchical structures of nodes. This creates a massive number of nodes, fitting to the ensembles definition given above. The interactions between these nodes are complex, because of the complexity of the structure, of the global result and of the environment. The type of environment where robots evolve is non-deterministic and can include interaction with humans or others robots / artifacts, fitting again to the ensemble definition given above.

Therefore swarm robotics has been chosen as one of the three case studies of the ASCENS project. The robots used in this case-study is the marXbot, developed at EPFL. The marXbot has an internal distributed architecture, called ASEBA. The marXbot can interact with other robots, even physically by self-assembling in a bigger entity. Finally the marXbot supports interaction with specific environment systems, such as an RFID ground. Because of this large set of features, the marXbot robot is the ideal platform to implement and validate the concepts developed within ASCENS. Stay tuned for astonishing new approaches to robot control design!